概要
説明
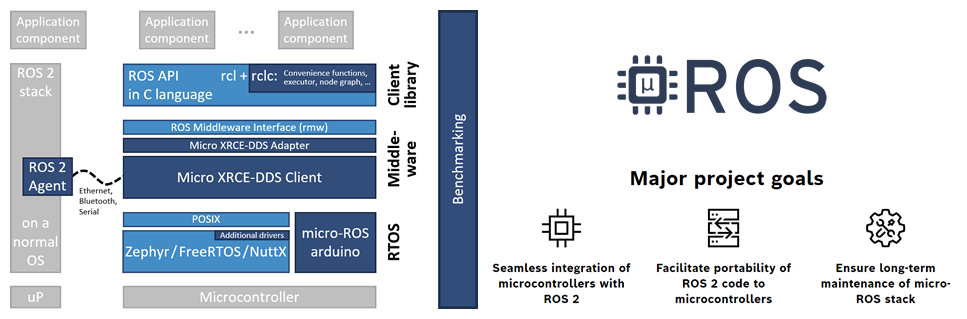
micro-ROS は 多くのロボットシステムで採用されているROS(Robot Operating System)の第二世代であるROS 2をマイクロコントローラで使用するためのオープンソースプロジェクトです。ROS 2ノードをマイクロコントローラ上に実現し、共通のフレームワークを使用することで、従来のロボットやIoTセンサ及びデバイスとの相互運用を可能とします。
RA micro-ROSソリューション
ルネサスはmicro-ROS フレームワークの第一人者であるeProsima社と協業し、RA6M5によるROSベースのロボットボディコントローラを開発、micro-ROS実装に最適なプラットフォームをご提供することによって、設計プロセスの簡素化を実現します。また、RA6M5/RA6T2ベースのマイクロROSプロジェクトは、物流・倉庫用のサービスロボット、セキュリティ、農業、ヘルスケアなど、様々なアプリケーション設計におけるリスク低減に貢献いたします。
Renesas micro-ROSソリューションに関するお問合わせはこちら:[email protected]
特徴
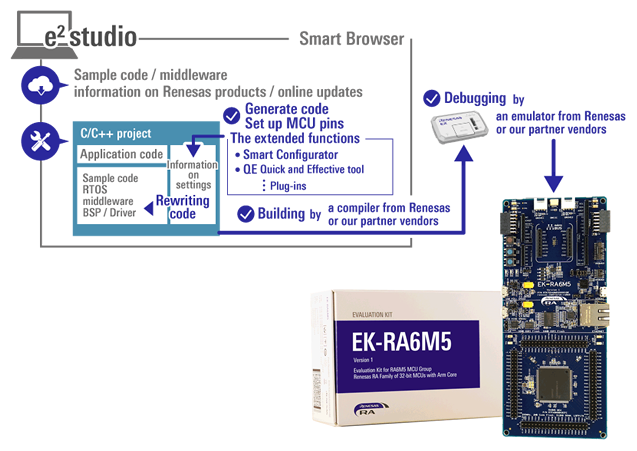
- micro-ROSプロジェクトをe2 studio統合可能
- RA6M5/RA6T2上で動作可能なソフトウェア、ハードウェアで構成、市場投入までの時間を短縮
- eclipse環境を提供する包括的なソリューション
ウィニング・コンビネーション:ROSベースのロボット本体コントローラ
このシステムは、ロボットオペレーティングシステム(ROS)をベースに、複数のサーボ制御を可能にします。 ROSは、オープンソースとして多数の企業で確保しているソフトウェアライブラリとツールのセットで、デザイナーがロボットアプリケーションを開発するのに役立ちます。
製品比較
アプリケーション
関連ボード&キット

RA6M5 MCUグループ評価キット
EK-RA6M5 評価キットを使用すると、RA6M5 MCU グループの機能を容易に評価できると共に、RAファミリが持つルネサス独自のFlexible Software Package (FSP)と様々なIDEを使用して、組込みシステム向けアプリケーションを開発することができます。
はじめに
クイックスタート サンプルプロジェクトを実行する
- EK-RA6M5ボードには、クイックスタート サンプルプロジェクトがあらかじめフラッシュメモリに書き込まれています。(ソースコードはEK-RA6M5 Example Project... 続きを読む

Renesas Flexible Motor Control Kit for RA6T2 MCU Group
MCK-RA6T2は永久磁石同期モータ(ブラシレスDCモータ)を使ったモータ制御の評価を簡単に行うことができる開発キットです。本製品と、ウェブサイトからダウンロードできるサンプルコードやQE for Motorを使うことで、RA6T2を用いたモータ制御評価をすぐに始めることができます。
本製品にはVersion 1 (型名RTK0EMA270S00020BJ)とVersion 2 (型名RTK0EMA270S00021BJ)の2つのバージョンがあります。
- Version 1とVersion 2は同梱しているCPUボード(MCB-RA6T2)のVersionが異なります。
- MCB-RA6T2... 続きを読む
ソフトウェア
ソフトウェア/ツールページ
| Software title | Software type | 会社名 |
|---|---|---|
| 統合開発環境 e² studio Eclipseベース ルネサス統合開発環境
[Support MCU/MPU: RA, RE, RX, RL78, RH850, Renesas Synergy, RZ] | IDE and Coding Tool | ルネサス |
1件 | ||
ビデオ&トレーニング

ニュース&ブログ
リソース
- eProsima micro-ROS Support
- eProsima - Renesas - RA Family
- micro-ROS Overview - Supported Hardware
- GitHub - micro-ROS/micro_ros_setup: Standalone build system tools
- GitHub - micro-ROS/micro_ros_renesas2estudio_component: A set of utilities for integrating micro-ROS in a Renesas e2 studio project
- GitHub - micro-ROS/micro_ros_renesas_testbench: micro-ROS hardware in the loop testing
- GitHub - micro-ROS/micro_ros_renesas_demos: Demo code for Renesas e2 studio


