Overview
Description
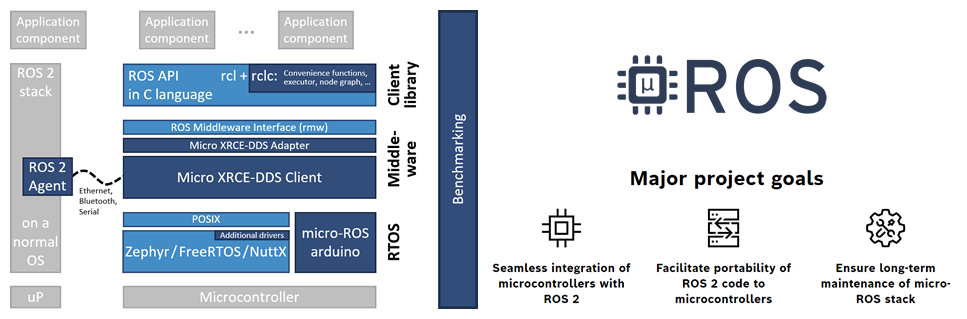
micro-ROS is an open source project to realize ROS 2, the second generation of ROS (Robot Operating System) on a microcontroller in various robot applications. By using a common framework, it enables interoperability with conventional robots, IoT sensors and devices.
RA micro-ROS Solution
Renesas is collaborating with eProsima, a leading provider of micro-ROS frameworks, to develop a ROS-based robot body controller based on RA6M5, which will simplify the design process by providing an optimal platform for micro-ROS implementation. The RA6M5/RA6T2-based micro-ROS project will also contribute to reducing the risk in the design of various applications, such as service robots for logistics and warehousing, security, agriculture, and healthcare.
For inquiries about the Renesas micro-ROS solution, please contact [email protected].
Key Features
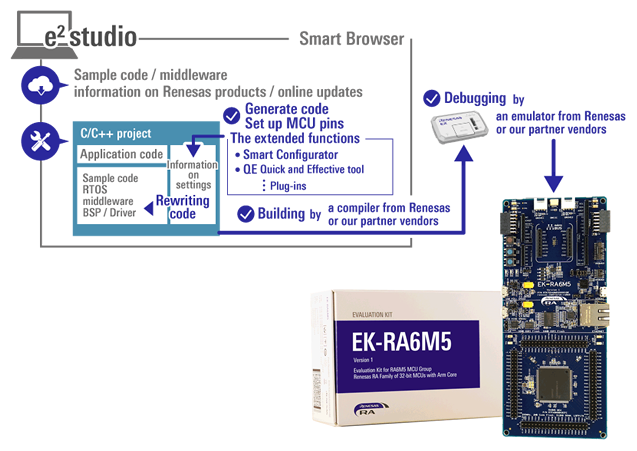
- Full professional integration of micro-ROS into the evaluation kit and e2 studio
- Software and hardware building blocks that work out of the box with RA6M5/RA6T2 as a time to market solution
- Comprehensive solution that provides an eclipse environment that covers the full development cycle
Winning Combination: ROS-Based Robot Body Controller
This system enables the control of multiple servos based on the Robot Operating System (ROS). ROS is a set of software libraries and tools, maintained by many companies as open source, that help designers build robot applications.
Comparison
Applications
Related Boards & Kits

Evaluation Kit for RA6M5 MCU Group
The EK-RA6M5 evaluation kit enables users to effortlessly evaluate the features of the RA6M5 MCU Group and develop embedded systems applications using the Flexible Software Package (FSP) and e2 studio IDE. Utilize rich on-board features along with your choice of popular ecosystem add-ons to... Read More

Renesas Flexible Motor Control Kit for RA6T2 MCU Group
The MCK-RA6T2 is a development kit that enables easy evaluation of motor control using permanent magnet synchronous motors (brushless DC motors). With this product and the sample code and QE for Motor that can be downloaded from the website, you can start evaluating motor control using the RA6T2... Read More
Software
Software & Tool Pages
| Software title | Software type | Company |
|---|---|---|
| e² studio Eclipse-based Renesas integrated development environment (IDE).
[Support MCU/MPU: RA, RE, RX, RL78, RH850, Renesas Synergy, RZ] | IDE and Coding Tool | Renesas |
1 item | ||
Videos & Training

News & Blog Posts
Resources
- eProsima micro-ROS Support
- eProsima - Renesas - RA Family
- micro-ROS Overview - Supported Hardware
- GitHub - micro-ROS/micro_ros_setup: Standalone build system tools
- GitHub - micro-ROS/micro_ros_renesas2estudio_component: A set of utilities for integrating micro-ROS in a Renesas e2 studio project
- GitHub - micro-ROS/micro_ros_renesas_testbench: micro-ROS hardware in the loop testing
- GitHub - micro-ROS/micro_ros_renesas_demos: Demo code for Renesas e2 studio
Support

Support Communities

