概要
説明
GR-LYCHEEはカメラと無線を搭載したIoTプロトタイピングボードです。 RZファミリRZ/A1LUグループ用のGRリファレンスボードで、Arduino UNOの接続ピンに互換性があり、 Arm®社が提供するMbed™開発環境を使用できます。また、Renesas Webコンパイラ、IDE for GRでのArduinoライクなスケッチも可能です。
技術サポート情報
- お問合せE-mail gadget_renesas@lm.renesas.com
ボード購入について
下記サイトからご購入いただけます。
特長
- 付属カメラでVGA(640x480)の画像を取得可能。USB CDCで送ると60fpsの転送レートも実現可能。
- OpenCV V3.2を適用し各種SDKを提供。コンピュータビジョンをすぐに楽しめます。
- 話題のESP32を搭載。Wi-Fiでクラウド接続、BLEでスマホ連携可能。
- 4極オーディオジャックを搭載。音声入出力が可能。
- SDカードを挿入可能。FlashAir™にも対応(FlashAir接続については関連情報タブをご参照ください)。
- Mbed™プログラミング可能。ストレージにコピーすればプログラム書き込み可能。
- オプションでUSB Aコネクタを装着可能。USBメモリ等の接続に使用できます。
アプリケーション
設計・開発
関連情報
回路・デザイン
- GR-LYCHEE回路図
- 部品表
- レイアウト
スケッチリファレンス
(Arduinoライク)
- GR-LYCHEEスケッチリファレンス
プログラム作成
- 特設サイト WebコンパイラでArduinoスケッチ!
- Mbedサイト
- 特設サイト IDE for GRでArduinoスケッチ!
- IDE for GR
- e2 studio(Eclipseベース)
e2 studio用プロジェクト
Eclipseをベースにした開発環境e2 studioでスケッチを行うためのプロジェクトファイルです。e2 studioのダウンロードとインストールについてはe2 studio製品ページを参照してください。
e2 studioのメニュー「ファイル」→「インポート」から、既存ワークスペースとしてアーカイブファイル(zip)のままインポートできます。
初回ビルド時はメニュー「プロジェクト」→「すべての依存関係を更新」を行ってください。次回ビルドから変更されたソースのみコンパイルされるようになります。
- OpenCV入りプロジェクト(2019年12月13日更新)
GR-LYCHEE Sketch OpenCV v10602 Project File (ZIP) (Arduinoスタイル, OpenCV含む)
GR-LYCHEE mbed Style OpenCV v10602 Project File (ZIP) (mbedスタイル, OpenCV含む) - OpenCVライブラリ生成プロジェクト
OpenCV Neon 02 Project File (ZIP)
DisplayApp
DisplayAppはUSB CDCで送信されたカメラ画像を表示するアプリケーションです。
- Windows版
DisplayApp File (Windows) (ZIP)
Windows 10以前のバージョンではUSBドライバのインストールが必要です。
- Mac版
DisplayApp File (Mac) (ZIP)
以下はArduinoライクなスケッチ例です。
#include <Arduino.h>
#include <Camera.h>
#include "DisplayApp.h"
Camera camera;
static DisplayApp display_app;
void setup() {
camera.begin();
}
void loop() {
display_app.SendJpeg(camera.getJpegAdr(), (int)camera.createJpeg());
delay(10);
}
}
FlashAirの接続について
GR-LYCHEEの裏面にあるSDソケットに東芝メモリ製 FlashAirTMを接続できます。GR-LYCHEEのカメラで保存した写真をスマートフォンやタブレットからアクセス可能です。また、iSDIOを使用してWi-Fiインタフェースとしても利用可能です。

動作確認済みの製品は以下の通りです。
- FlashAir W-03 (8GB, 16GB, 32GB)
- FlashAir W-04 (16GB, 32GB)
補足: W-04の場合、ファームウェアW4.00.01以降でCMD17/24によるiSDIO機能を使用できます。ファームウェアの更新についてはこちらを参照してください。
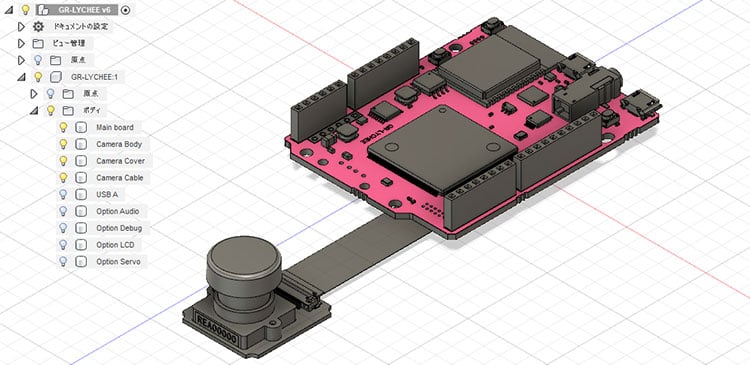
Fusion 360用3Dデータ
Autodesk Fusion 360でインポートできる3Dデータです。GR-LYCHEE用のケースなどを作るときに活用してください。
GR-LYCHEE Autodesk Fusion 360 File (ZIP)
サポート
サポートコミュニティ
- GR-peach で PILやOpenCV を使用することはできますか?
こんにちは、cobaと申します。質問させて頂きます。 自分の用意した画像をe-AIを使用しGR-peachで識別させたいと思い、トレ ...
2017年12月26日 - J-Linkを用いてRZA1Hへのプログラム書き込み方法
J-Link BASEを使って、mbed-os-example-blinky.binをGR-peachに書き込む方法を検討しておりますが、 J-Link Commander上では書き込みに成功しているも ...
2018年10月23日 - GPIO の代わりに高速でON-OFFできるI/Oは?
毎々お世話になります。 GPIOのPort出力で CLKを作ろうとしたのですが周期が750nsと遅いので、もっと速い 出力はないでしょ ...
2019年8月21日



