
BLDC(ブラシレスDC)モーターは、直流電源で駆動される電動モーターです。 ブラシレス構造により摩耗や抵抗を最小限に抑え、従来型モーターを凌ぐ高効率・高耐久性を実現します。 これにより、信頼性の向上、長寿命化、そしてメンテナンスの最小化が実現します。 ただし、これらのモーターには、巻線間で電流を正確に切り替えるための高度な制御アルゴリズムを必要とします。 Renesasは、ハードウェアとソフトウェアの両面で正確な制御アルゴリズムをお客様へ提供することに関して、先駆的な役割を果たしてきました。 BLDCモーターを駆動するためのアルゴリズムには、ベクトル制御(FOC:フィールド指向制御)、台形波制御、その他の方式があり、用途や制御要件に応じて、センサーあり/センサレスのアプローチが選択されます。
本ブログでは、センサレス制御を用いてBLDCモーターの起動異常を検知する手法にフォーカスし、信頼性向上への取り組みをご紹介します。
なぜセンサレス方式がフィールド指向制御に最適なのか?
センサレスアプローチを使用することには、いくつかの利点があります。 センサレス制御により、センサー関連の機械的複雑さを排除してモーター寿命を延ばし、保守コストを削減するとともに、部品点数(BOM)の最適化によって製品全体のコスト効率を高めます。 ただし、これらの利点は、モーターの起動と低速の精度に関してはコストがかかります。 そこで、モーターの起動に関連する異常を検出できるAIモデルをトレーニングすることで、BLDCモーターの起動を改善することにしました。
BLDCモーターの起動異常を、どう見抜くか?
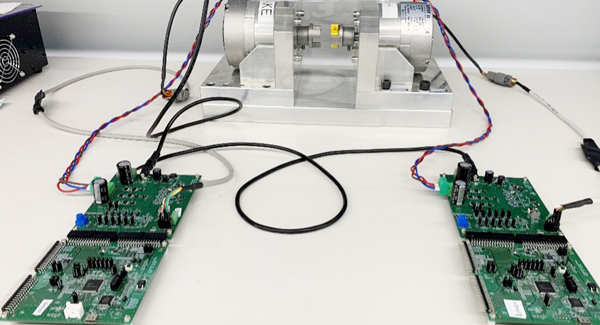
2モーター構成のモーターベンチを活用し、BLDCモーターの起動シーケンスにおける異常をAIモデルでスマートに検出・解決。 1台のモーターで起動異常を意図的に発生させ、もう1台を負荷として使用することで、BLDCモーターの起動シーケンスにおける異常検出をAIモデルで実現。 このモーターベンチの魅力は、リアルタイムで負荷を自在に変化させられる柔軟性にあります。 各モータは、ルネサス のRA6T2モータ制御キット(MCK-RA6T2)を介して制御されています。 MCK-RA6T2は、CPUユニット「MCB-RA6T2」と低電圧インバータ「 MCI-LV-1 」で構成されています。 セットアップは次のようになります。

モーターベンチは、MCK-RA6T2に接続されたローカルPCからグラフィカルユーザーインターフェース(GUI)によって制御されます。 モーターのパラメータが正しくない場合、モーターは始動しようとしますが、負荷が接続されている場合は停止します。 ただし、この場合、GUIにはモーターが停止したことは表示されません。代わりに、モーターが常に動作しているというフィードバックを受け取ります。
AIモデルをトレーニングして、モーターの起動パターンを検出し、異常を検出できます。 まず、インバーターで測定された電流および電圧を含むモーターのデータセットを収集します。 AIモデルが十分にトレーニングされると、モーターからの電流のさまざまなパターンを区別し、モーターの電流起動に関する正確な情報を提供できます。 これにより、GUI上でモーターの起動ステータスの正確な結果を提供できます。
AIモデルを開発
ルネサスのAI COEチームは、異常を検出するためのAIモデルを開発しました。 この異常は、上記のモーターベンチを使用して、起動時のパラメータを変更することでシミュレーションしました。これは、ユーザーが正常なスタートアップシーケンスを構築するための正しいパラメータを認識していない場合に発生する可能性があります。
AIモデルを開発するために、図2のモーターベンチからデータセットを収集しました。 このデータセットには、モーターに影響を与える可能性のある2つの状況 (1 つはモーターに負荷が接続された場合、もう 1 つは負荷がない場合) を示しています。
本モデルは、以下の4つの状況を検知することが可能です。
- モーターに負荷が取り付けられている場合の正常な動作
- モーターに負荷が取り付けられている場合の異常な動作
- モーターに負荷がない場合の正常な動作
- モーターに負荷がない場合の異常動作
すべてのケースにおいて、起動時の異常を確実に検知できるよう、開発済みのAIモデルを用いて評価・検証を行う必要があります。 各ケースに特化したデータセットを収集し、それぞれに最適化されたAIモデルを構築・学習しました。
データの収集とAIモデルのトレーニング
データセットは、データ ストレージ ツールを使用して収集されています。 このツールは、e2 studioに統合されているReality AI Utilities機能の一部です。 MCK-RA6T2からデータを取得し、収集したデータを直接ルネサスのReality AI Tools®にアップロードします。 このクラウドツールを活用することで、Renesas製MCU向けにAIモデルの学習と最適化が可能となり、RAMとフラッシュのフットプリントを最小限に抑えることができます。 モデルの学習が十分に進んだ段階で、性能評価のために独立したデータセットを用いてテストを実施します。 モデルの性能が学習結果と相関していることが確認できれば、MCK-RA6T2上にモデルを実装し、実際のモーターを用いた次の検証フェーズへと進みます。

モデルの精度はフィールドから直接収集されるため、モデルの RAM 消費量はわずか 576 バイト、フラッシュも 4146 バイトになります。
Edge AIを活用し、当社のモーター制御ファームウェアにこのモデルを直接統合することで、モーターに影響を及ぼす起動時の異常をリアルタイムで検知することが可能になります。
評価を始めるには、モーター制御キット(MCK-RA6T2)をご確認のうえ、Reality AI Toolsのデモをご依頼ください。詳細情報もあわせてご覧いただけます。

