
概要
説明
レゾルバを用いたモータ制御ソリューションは、ルネサス製のレゾルバデジタルコンバータ(RDC) ICとRXファミリのマイコンを組み合わせて実現する産業・民生向けのモータ制御システムです。対象マイコンのドライバソフトウェアを使用することで、レゾルバを用いたステッピングモータやブラシレスDCモータの制御を容易に行うことができます。レゾルバ付きモータ用のソリューションキット、サンプルコード、開発支援ツール、アプリケーションノートを用意しており、すぐにレゾルバを使ったモータ制御を始めることができます。
● 特長
- 熱やホコリ、振動など厳しい環境でも高精度にモータ制御が可能
- よりコストパフォーマンスに優れた新方式のレゾルバ制御により、高精度な制御を安価に実現
- RXマイコンを組み合わせて使用できるドライバのAPIからレゾルバ信号のゲインや位相、角度誤差を自動で補正して高精度化を実現
● システム構成
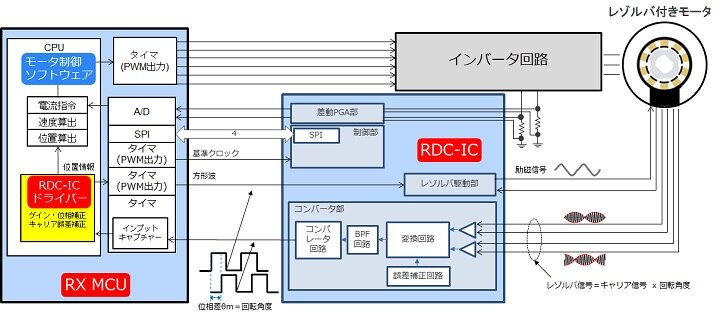
レゾルバを用いたモータ制御ソリューションは、レゾルバからの信号をRDC ICとRXマイコンで角度情報として処理し、RXマイコンでモータ制御を行います。 RXマイコンにRDC ICの専用ドライバを用意しており、レゾルバの処理をAPIから容易に行うことができます。
◆ 対応レゾルバと対応モータ
- ステッピングモータ用とブラシレスDCモータ用のドライバを用意しており、どちらも対応可能です。通常、ステッピングモータは磁気ノイズの影響でレゾルバセンサの使用が困難ですが、本ソリューションではノイズの対策もあり適用可能です。
- 電圧検出型レゾルバと電流検出型レゾルバに対応可能です。一相励磁二相出力のタイプのレゾルバである必要がありますが、一般的な電圧検出型のレゾルバだけでなく、安価に製造できる電流検出型のレゾルバにも対応可能です。
◆ レゾルバを用いたステッピングモータのモータ制御ソリューション
- ミネベアミツミ株式会社とルネサスが協業して開発した、レゾルバ付きステッピングモータとレゾルバモータ制御ソリューションにより、通常オープンループで制御するステッピングモータをサーボ制御することができます。
- このソリューションは低騒音・低振動、低消費電力、モータトルクの最大化など多くのメリットを実現します。
◆ これまでの課題
- トルクの脱調マージンを確保するために大きめのモータを選定する必要がある
- オープンループ制御でのステッピングモータは消費電流が大きく、発熱も大きい
- トルクリプルにより振動、騒音がある
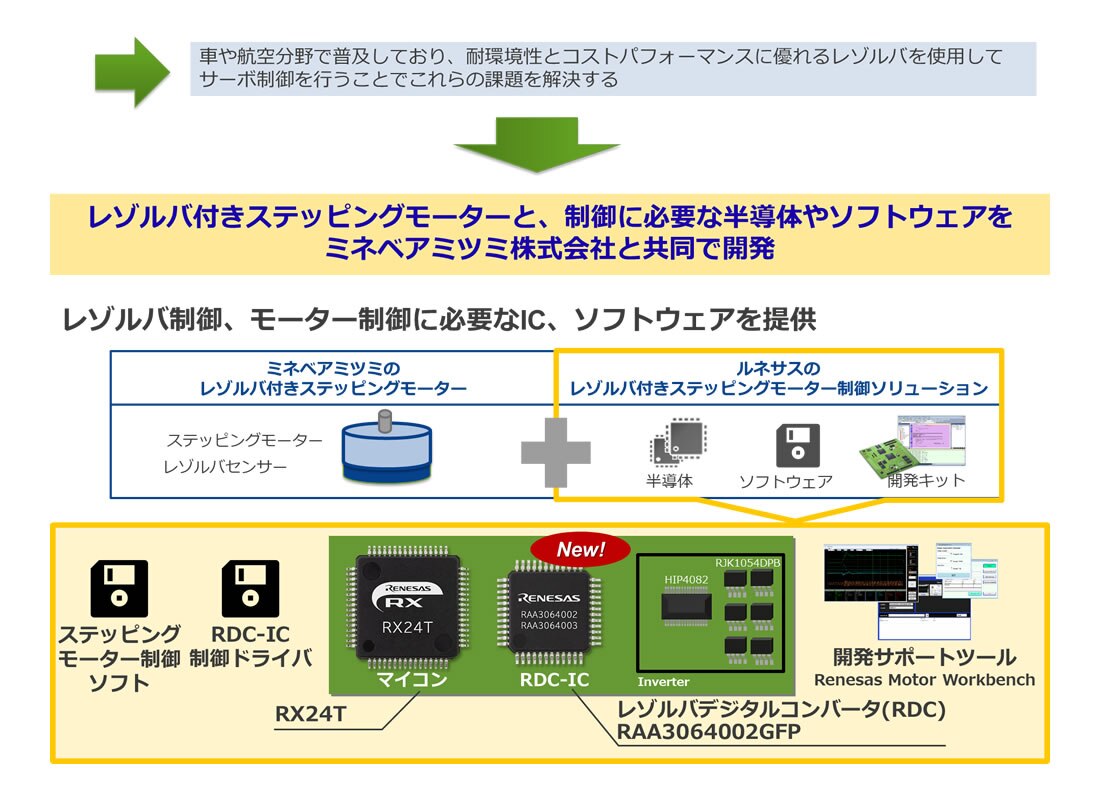
提供物
- レゾルバ付きステッピングモータ: ミネベアミツミ株式会社が新たに開発したモータ
- RX24T: モータ制御向けマイコン
- レゾルバデジタルコンバータ: レゾルバの出力をデジタル信号に変換するIC
- 開発キット: レゾルバ付きステッピングモータの制御に必要なアイテム一式を提供
● ソリューションの効果
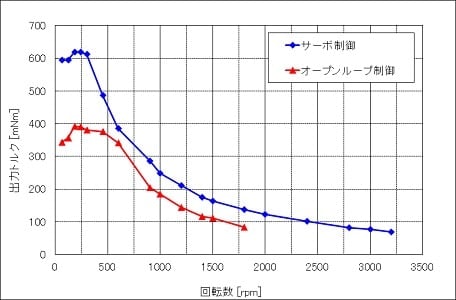
◆ モータトルクの最大化
サーボ制御を行うことでモータの最大トルクまで使用することができ、高速回転まで対応可能になります。脱調マージンを考慮したモータ選定ではなく、単純な必要トルクからモータ選定できるので、オープンループ制御と比較してモータの小型化が可能です。
◆ 低消費電力
レゾルバを使用したサーボ制御を行うことで待機時の電流を大幅にカットすることができ、負荷に応じた必要な電流だけを消費します。また、消費電流を抑えることで、モータの発熱も抑えることができます。
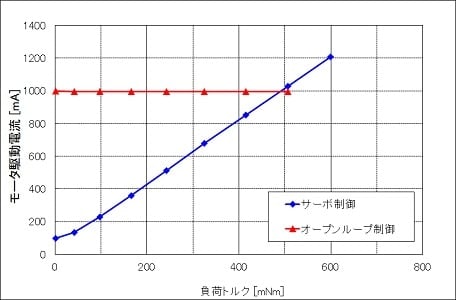
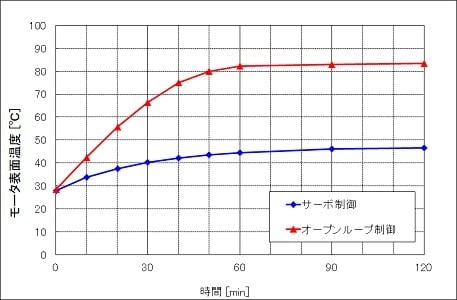
オープンループ時は負荷トルク500mNm以上になると脱調してしまうのでデータ未取得。
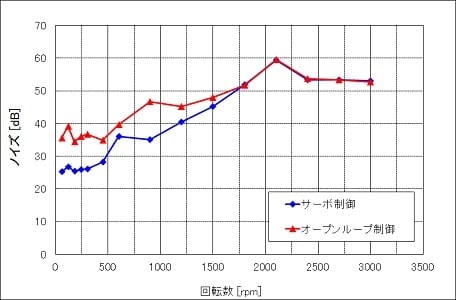
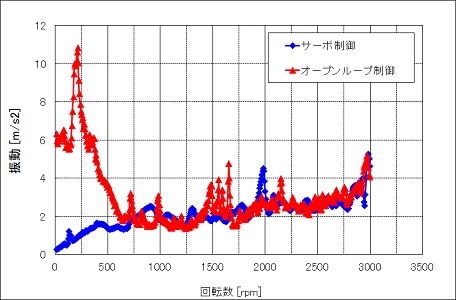
◆ 低騒音・低振動
オープンループ制御と比較して、レゾルバを使ったサーボ制御を行うことで特に中速域までの騒音や振動を抑えることができます。
● 2軸アームロボットのリファレンスガイド
レゾルバ付きステッピングモータによるモータ制御ソリューションを活用し,2軸アームロボットのリファレンスガイドを作成しました。
◆ 特徴
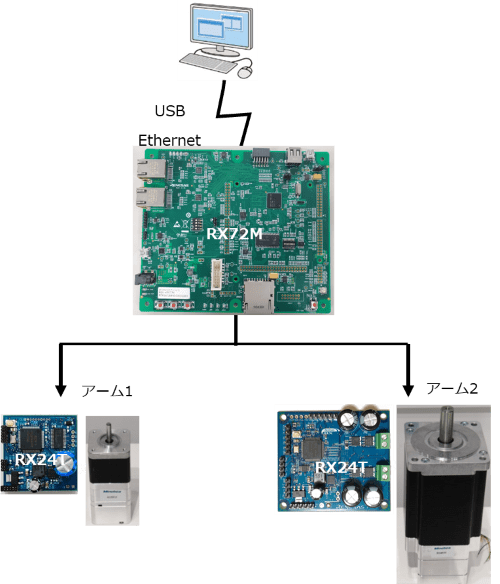
- NC制御をRX72M,各軸のモータ制御をRX24Tで実施
- アームの軌跡制御(CP制御)により,最大250mm/sの速度で可動域150mm×153mmの範囲内の任意経路を連続動作可能
- レゾルバの高位置分解能(200,000P/R)により,±0.2mm位置決め精度を実現
◆ 公開アイテム
- 2軸アームロボットのリファレンスガイド
- NC制御,モータ制御のサンプルプログラム
- アームロボット構造図面
- 42mm角モータ制御基板回路図・パターン図・部品表
- 85mm角モータ制御基板回路図・パターン図・部品表
- デモ用PC GUIツール
◆ 概略図
- GUI(PC)
- ティーチング
- デモ動作実行
- NC制御ボード
- 軌跡制御
- 補間演算(直線補間、円弧補間)
- 加減速演算(移動平均フィルタ)
- 関節角度演算(逐次ヤコビ演算)
- 単軸移動(補間なし、角度指定)
- 連続動作機能(直線移動と円弧移動の組合せ動作)
- 軌跡制御
- 通信
- RS485,半二重Modbus通信(1Mbps)
- 使用モータ
- 2相ステッピングモータ
- レゾルバ
- 位置分解能20万P/R
- モータ制御
- 位置/速度/電流ベクトル制御
◆ アプリケーションノート
レゾルバ付き2相ステッピングモータを使用した2軸アームロボットのリファレンスガイド Rev.1.00 (PDF | English, 日本語)
◆ リファレンスガイド
RX24T, RX72M, RAA3064002GFP/RAA3064003GFP Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev.1.00 - Sample Code (ZIP | English, 日本語)
◆ デモ動画
◆ ブラシレスDCモータのソリューション
開発中
製品比較
アプリケーション
関連ボード&キット

Evaluation System for Stepping Motor with Resolver
ルネサスが提供するRXファミリとレゾルバデジタルコンバータ(RDC) ICを容易に評価・検討できるソリューションキットです。
レゾルバ付きのステッピングモータを同梱しており、webからダウンロードできるソフトウェアを用いてキット購入後すぐに評価を始めることができます。
ソフトウェア
ソフトウェアダウンロード
| 分類 | タイトル | 日時 |
|---|---|---|
| サンプルコード | [Toolchains=CC-RX|V3.04.00] ZIP 101.88 MB English アプリケーション: モータドライブ Compiler: CC-RX IDE: CS+, e2 studio | |
| サンプルコード | ZIP 81.81 MB English Compiler: CC-RX IDE: CS+, e2 studio | |
| サンプルコード | ZIP 22.06 MB English Compiler: CC-RL Function: Application Example IDE: e2 studio このサンプルコードは、2軸アームロボットデモ機のチューニングやGUIによるデモ動作を行うためのサンプルソフトウェアです。RX72Mベースのアームロボット軌跡制御ソフトウェアと、RX24Tベースのモータ制御ソフトウェアで構成されています。 | |
3件 | ||


