概要
説明
RoX SDK(R-Car Open Access Software Development Kit)は、RoX Whiteboxおよび(将来的には)RoXライセンスを含むR-Car SoC向けソフトウェアのeasy-to-startとeasy-to-useを実現する利便性の高い開発フレームワークです。
車載アプリケーション向けソフトウェア環境を再構築
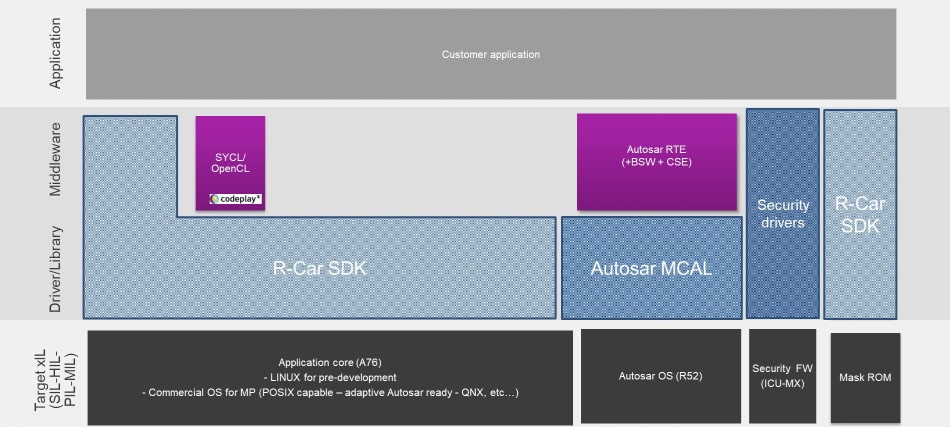
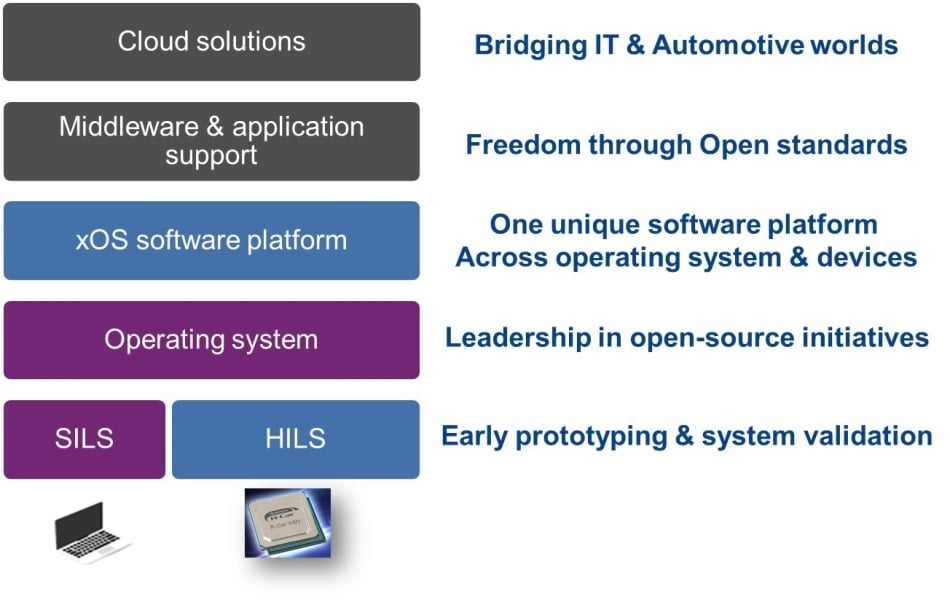
RoX SDKには2つのバージョンがあり、ユーザの要望に合わせ柔軟に対応します。まず一つは、 ロイヤリティフリーのOSやハイパーバイザソフトウェア(Android Automotive OS、FreeRTOS、Linux、Xen、Zephyr RTOSなど)や、それぞれのドメインシステム向けに設計されたリファレンスアプリケーションなど、オープンでアクセスしやすいソフトウェアパッケージです。 もう一つのライセンスパッケージは、QNXやRed Hat In-Vehicle Operating Systemなどの業界で実績のある商用ソフトウェアソリューションと、AUTOSAR準拠のソフトウェア、SAFERTOS®をベースにしており、ルネサスのR-Car SoCおよびMCU上での事前統合、テストされた状態でユーザへ提供いたします。また、これらには先進運転支援システム(ADAS)向けのSTRADVISION、車載インフォテインメント(IVI)向けのCandera CGI Studioなどの事前検証済みソフトウェアスタックが含まれています。
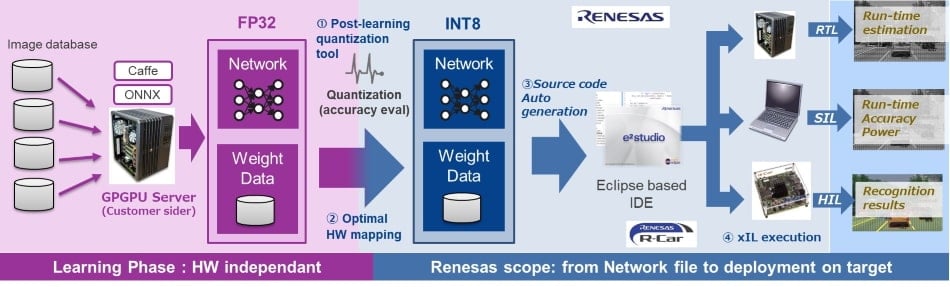
民生用アプリケーションやサーバアプリケーションをベースに構築されたディープラーニングソリューションの多くは、車載用途に求められる機能安全性やリアルタイム応答性、低消費電力などの厳しい制約の下では、期待された動作の実現は困難です。ルネサスが今回リリースしたRoX SDKは、ルールベースの車載コンピュータビジョンおよびAIベースの機能向けの開発フレームワークとなっています。
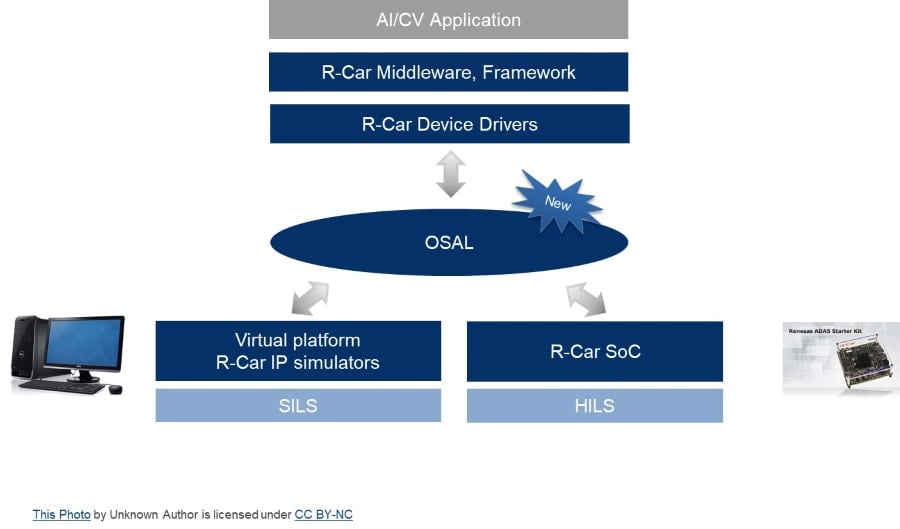
RoX SDKのシミュレーションプラットフォームでは、この両方のハードウェアアクセラレータを検証でき、リアルタイムで高精度なシミュレーションを実現します。また、WindowsとLinuxの両方に対応したPCベースの開発ツールを完備しています。
Hybrid Compiler(HyCo)などのAIツールを含む統合IDE、RoX AI Workbenchにより、ADASや自動運転向けの高性能リアルタイム・コンピュータ・ビジョン・アプリケーションの作成を可能にします。
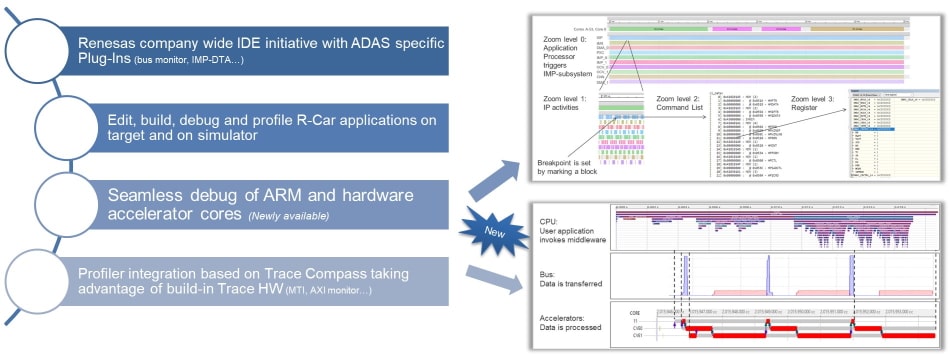
また、ルネサスのe2 studioはオープンソースのEclipseベースの開発環境で、フルセットのデバッグ機能と最先端のGUI(Graphical User Interface)が搭載されています。 R-Car用特別バージョンは、ユーザがサードパーティ製のツールを容易にカスタマイズして統合することができ、画像処理やディープラーニングのサブシステムのバスモニタリングやデバッグ機能をサポートしております。
RoX SDKは、ルネサス製品のベンチマークにも最適なプラットフォームであり、ユーザのターゲットアプリケーションに最適なSoCを選択することができます。
ルネサスのWebサイトから入手できるCNNネットワーク、ワークショップ、アプリケーションノートなどの充実したソフトウェアがフルセットになったRoX SDKでユーザの次世代の開発をサポート致します。

特長
- 開発ツール
- e² studio GUI
- リアルタイムデバッグ用のADASプラグイン
- ディープラーニングツールチェーン
- コンピュータビジョン コンパイラ
- クロスコンパイラ
- シミュレーションプラットフォーム
- 正確でかつ迅速なシミュレーション用HWアクセラレータ モデル
- MIL(モデルインザループ)
- SIL(ソフトウェアインザループ)
- HIL(ハードウェアインザループ)
- ライブラリとサンプルコード
- ディープラーニングとコンピュータービジョン ライブラリ
- 3Dグラフィクスライブラリ(OSに依存します)
- ビデオ・コーデック
- ボードサポートパッケージ
- コンピュータビジョン向けサンプルSWとチュートリアル
ターゲットデバイス
ドキュメント
ピックアップ
ログイン後、ご登録が可能となります。
|
|
|
|
|---|---|---|
| 分類 | タイトル | 日時 |
| ガイド | PDF 1.29 MB | |
| トレーニング | 7Z 334.68 MB | |
| トレーニング | 7Z 392.91 MB | |
| マニュアル-ソフトウェア | ZIP 10 KB | |
| マニュアル-ソフトウェア | PDF 4.69 MB | |
5件
|
||
設計・開発
サポート



ビデオ&トレーニング
この動画では、R-Car SoCにおいてマスタブートコアによって起動した各CPUコアの動作を止めることなく、デバッグ接続する方法を説明します。
関連資料