概要
説明
R-Car SDK(Software Development Kit)は、ADASや自動運転システムのディープラーニングによるソフトウェア開発を加速する使いやすい開発フレームワークです。
車載アプリケーションのためにソフトウェア開発を再構築
自動車メーカは、次世代の車載スマートカメラアプリケーションや自動運転システムを実現するために、ディープラーニングの活用を模索しています。ディープラーニングソリューションの多くは、民生用アプリケーションやサーバアプリケーションをベースに構築されており、車載用途に求められる機能安全性やリアルタイム応答性、低消費電力などの厳しい制約の下では、多くの場合、期待した通りには動作しません。
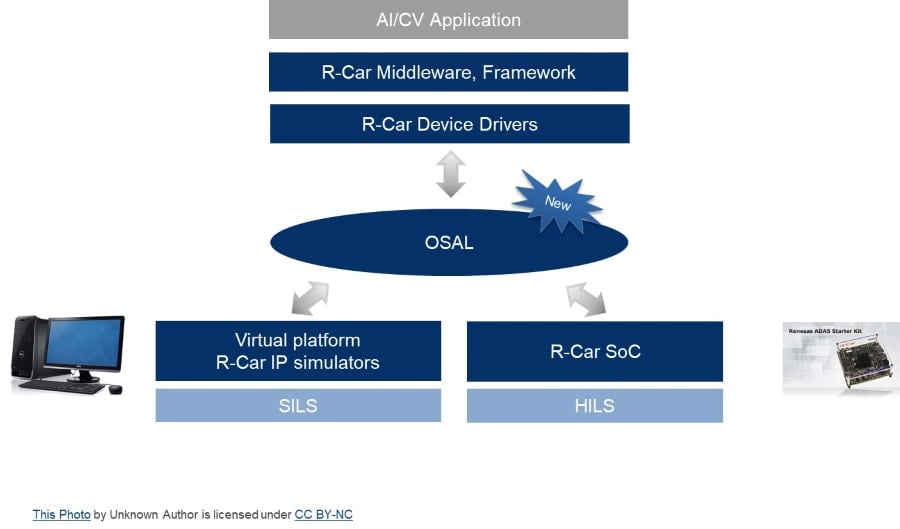
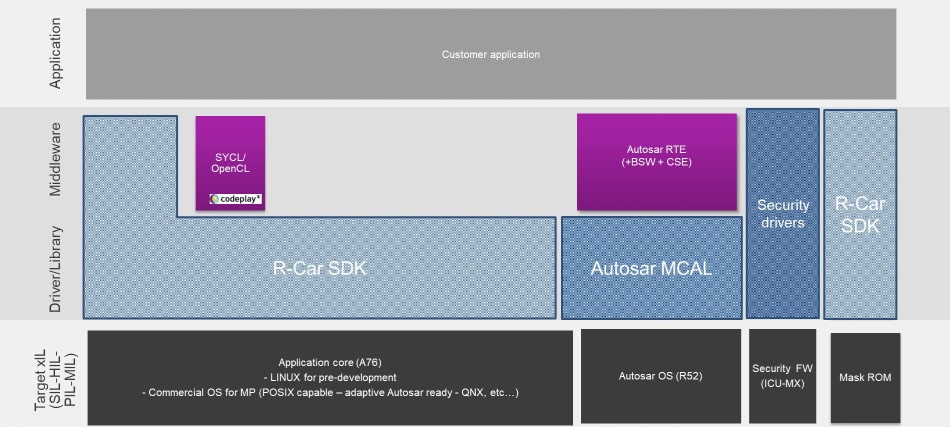
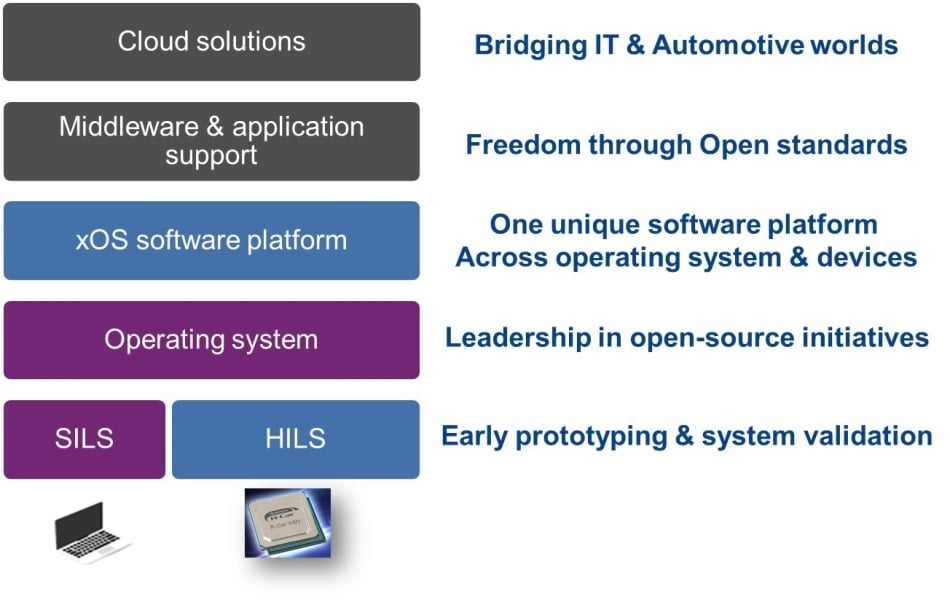
ルネサスの車載カメラ用SoCのR-Car V3HおよびR-Car V3Mに最適化されたR-Car SDKは、ルールベースのコンピュータビジョンと、AIベースのディープラーニングによる学習結果をサポートするように構築されています。シミュレーションプラットフォームでは、この両方のハードウェアアクセラレータを検証でき、リアルタイムで高精度なシミュレーションを実現します。また、WindowsとLinuxの両方に対応したPCベースの開発ツールや、ディープラーニング、コンピュータビジョン、ビデオコーデック、3Dグラフィックスなど、複数のソフトウェアライブラリを完備しています。さらに、R-Car SDKはオープンソースソフトウェアとして提供されるLinux以外にも、複数のASIL-D準拠のOS(QNX®、eMCOS®、INTEGRITY®など)を1つのパッケージでサポートしていく予定です。
統合ソフトウェア開発環境「e² studio for R-Car」
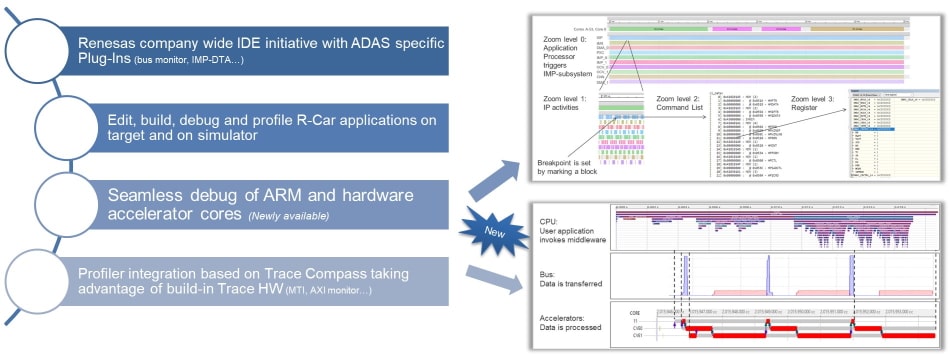
ルネサスは、R-Car Vシリーズ向けに、統合開発環境e² studioの特別バージョンを提供します。e² studioはオープンソースのEclipseベースの開発環境で、フルセットのデバッグ機能と最先端のGUI(Graphical User Interface)が搭載されています。R-Car Vシリーズ用特別バージョンは、ユーザがサードパーティ製のツールを容易にカスタマイズして統合することができ、また、画像処理やディープラーニングのサブシステムのバスモニタリングやデバッグ機能をサポートしました。
始めやすい、入手しやすい、使いやすい、開発しやすいR-Car SDK
R-Car SDKには、サンプルソフトウェア、一般的なCNNネットワーク、ワークショップ、アプリケーションノートなども充実しているため、ルネサスのR-Carプラットフォームを初めて使う方でも、簡単にアクセスでき、早期に開発を開始できます。また、ルネサス製品のベンチマークにも最適なプラットフォームであり、例えばR-Car V3HとR-Car V3Mを比較するなど、ユーザのターゲットアプリケーションに最適なSoCを選択することができます。

特長
- 開発ツール
- e² studio GUI
- リアルタイムデバッグ用のADASプラグイン
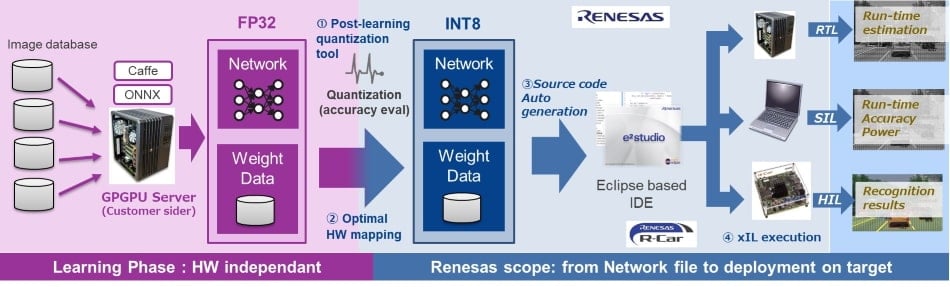
- ディープラーニングツールチェーン
- コンピュータビジョン コンパイラ
- クロスコンパイラ
- シミュレーションプラットフォーム
- 正確でかつ迅速なシミュレーション用HWアクセラレータ モデル
- MIL(モデルインザループ)
- SIL(ソフトウェアインザループ)
- HIL(ハードウェアインザループ)
- ライブラリとサンプルコード
- ディープラーニングとコンピュータービジョン ライブラリ
- 3Dグラフィクスライブラリ(OSに依存します)
- ビデオ・コーデック
- ボードサポートパッケージ
- コンピュータビジョン向けサンプルSWとチュートリアル
- SoCデバイス
- R-Car V3M
- R-Car V3H2
- その他のR-Car(ルネサスまでお問い合わせください)
- リファレンスボード
- V3Mスタータ
- V3M評価ボード
- V3H2スタータキット
- V3H2評価ボード
アプリケーション
ドキュメント
ピックアップ
ログイン後、ご登録が可能となります。
|
|
|
|
|---|---|---|
| 分類 | タイトル | 日時 |
| ガイド | PDF 1.29 MB | |
| マニュアル-ソフトウェア | ZIP 10 KB | |
| マニュアル-ソフトウェア | PDF 4.69 MB | |
3件
|
||
設計・開発
ソフトウェア/ツール
ソフトウェア/ツール
| Software title
|
Software type
|
会社名
|
|---|---|---|
| R-Car向けe² studio ADASおよび自動運転のための統合ソフトウェア開発環境。 コンピュータービジョンやディープラーニング(深層学習)アルゴリズムのソフトウェア開発を容易にする革新的なオープン開発環境。
|
IDE and Coding Tool | ルネサス |
| マルチデバイス用分散処理ソフトウェア アプリケーションが持つ機能を複数のSoCやマイコン内部のCPUやHWIPへ分散配置しハードウェアが持つ性能を最大限引き出すソフトウェアです。
|
Solution Toolkit | ルネサス |
2件
|
||
関連ボード&キット

Starter
Y-ASK-RCAR-V3M
アクティブ
R-Car V3Mスタータキット
ADASや自動運転応用におけるソフトウェア開発はますます大規模・複雑化しています。特に拡大著しいNew Car Assessment Program(NCAP、注1)向けカメラ市場において、低消費電力と高性能を実現しながらビジネスチャンスを逃さないソリューションが求めらています。そこでルネサスは、オープン、イノベイティブ、トラステッドなRenesas autonomy™プラットフォームの一環として、オープン開発環境を拡充する「R-CarV3Mスタータキット」を開発しました。
R-Car V3Mスタータキットには...
推奨ドキュメント:

Starter
Y-ASK-RCAR-V3H
アクティブ
R-Car V3Hスターターキット
先進運転支援システム(ADAS)および自動運転(AD)用ソフトウェア開発において、近年、ますます開発が加速し、車自体を差別化する新たな機能を開発するため、規模や複雑さが増加しています。 この流れに対応するべく、ルネサスは自動車用ソフトウェアの開発を支援するためにR-Car V3Hスターターキットを開発しました。
R-Car V3Hスターターキットは新車アセスメントプログラム(NCAP、注1)、フロントカメラアプリケーション、サラウンドビューシステム、および光検出・測距(LiDAR)アプリケーションを簡素化し、 かつ高速化します。 このスターターキットはR-Car...
推奨ドキュメント:

Development
RTP0RC77980SEBS012SA01
アクティブ
ADAS & Automated Driving ソリューション R-Car V3H 開発ボード / Condor-I
R-Car SoCとPMICをはじめとする各種電源ICとクロックジェネレータのコンビネーションにより、画像入力、画像出力や高速入出力IFに対応した高効率で高性能なADAS ソリューションを実現します。

Development
eCUBE
アクティブ
Lacroix 製 eCUBE 開発プラットフォーム
新しいプラットフォームやプロトタイプを作成するにあたり、ADAS開発者は、eCUBEを使うことによって開発者の労力と時間を節約できます。本開発プラットフォームは、机上だけでなくテスト車両に搭載することも可能です。
eVIEW は、Linuxベースのオープン API を使用して、カメラセンサから表示までの一連の動作を実現し、映像フレームを直接取り出すことが可能です。
eVISION は、学習済みのニューラルネットワークライブラリの一例(交通弱者検出)になります。このライブラリは、Renesas V3H Computer Vision...
Provider:
Lacroix Impulse推奨ドキュメント:
Development
EagleCAM
アクティブ
LUPA製EagleCAMスマートカメラプラットフォーム
ディープラーニング(深層学習)搭載インテリジェントカメラ向け”Ready To Use”開発環境
EagleCAMはオープンなフロントカメラのソリューションで、ルネサスのR-Car V3HおよびR-Car V3Mシステムオンチップ(SoC)が搭載されています。 オールインワンのスケーラブルなカメラプラットフォームは、自動緊急ブレーキ、前方衝突警告、車線維持支援、交通標識認識など、最新のユーロNCAPとC-NCAPの要件をサポートしています。
このEagleCAMソリューションにより、ユーザは、運転機能に関する独自のソフトウェアやサードパーティ製ソフトウェアを統合することで...
Provider:
LUPA-Electronics GmbH推奨ドキュメント:
ビデオ&トレーニング
R-Car用e²studioの使用方法 - R-CarS4用インストールガイド
R-Car S4用e² studioのインストールとセットアップ方法を説明する動画です。
Video List

