Overview
This page describes sensing using the GR-CITRUS mruby framework.
Preparation
Hardware
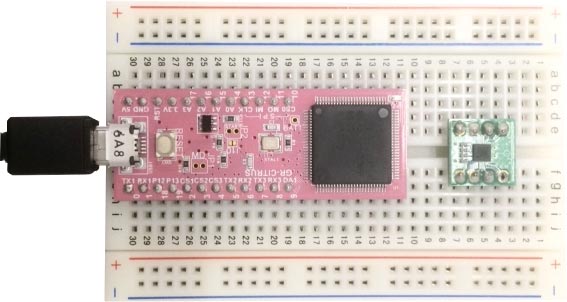
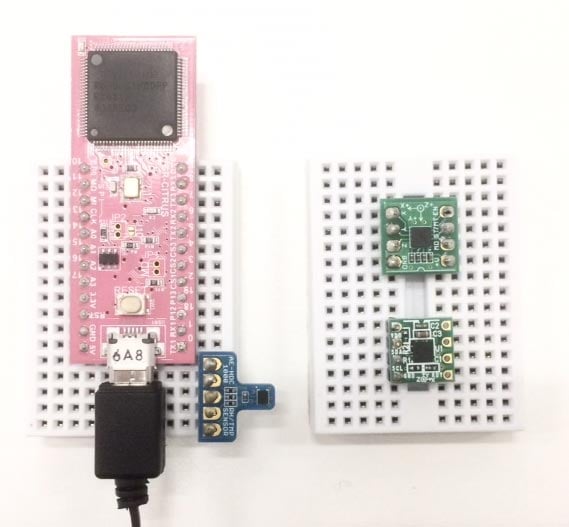
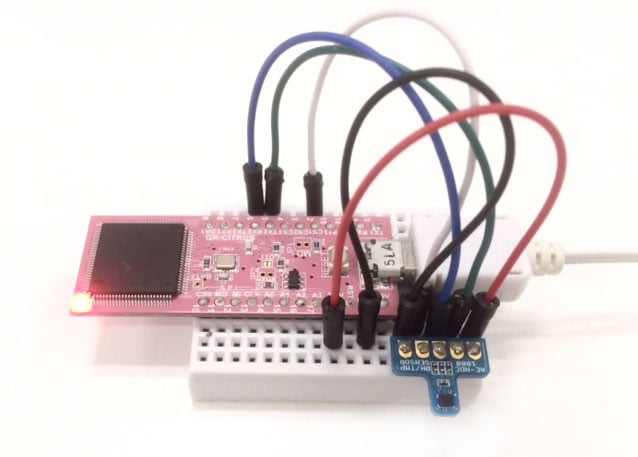
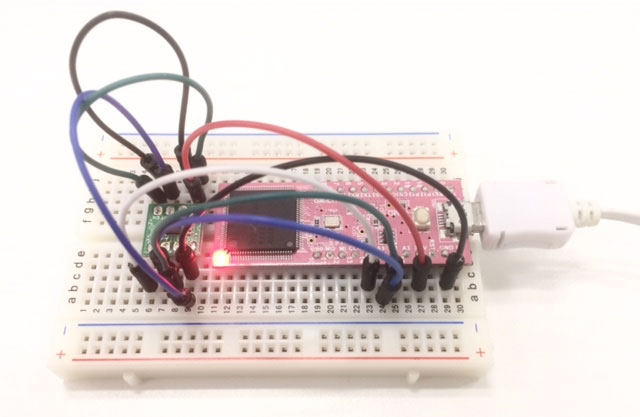
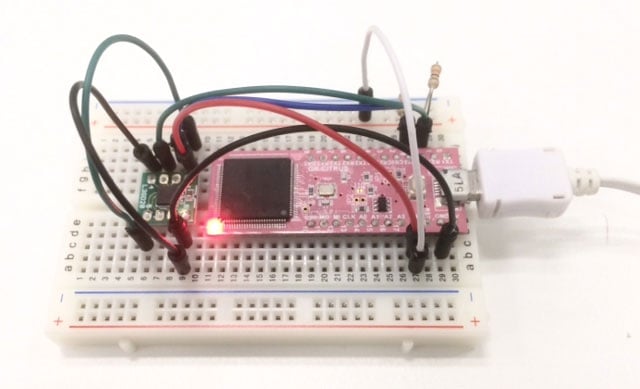
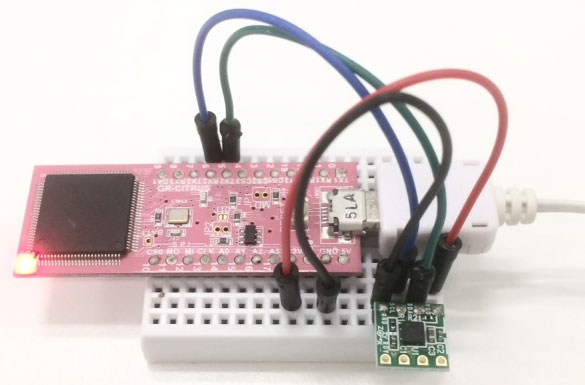
For this project, you will need the GR-CITRUS board, a USB cable (Micro B type), a jumper wire, a breadboard, and a sensor module. The sensor can be a trial-use version. As shown in the image here, the breadboard will be used to connect the USB cable to the GR-CITRUS board, so you will need either one large bread board, or two small pieces.
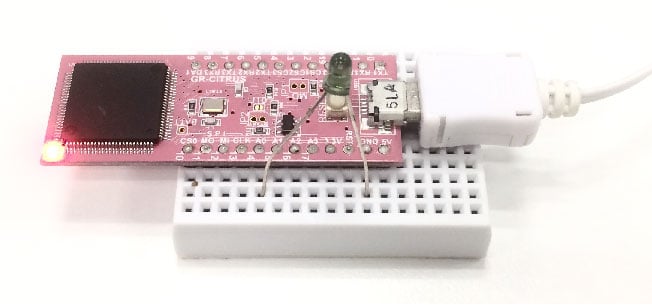
You will need four or five wires for one sensor module. If you are using a luminance sensor (photo transistor), you will not need the wires.
Software
We will be using Rubic for this project, so please familiarize yourself with the tool by referring to the "Starting Out with Rubic (Ruby Version)" project.


Illuminance
This example uses the NJL7502 photo transistor.

Pin Connections
| Sensor | GR-CITRUS |
|---|---|
| Anode | 14 |
| Cathode | GND |
Sample 1
This sample uses analogRead to perform sensing 100 times. To avoid having to connect an external resistor, the GR-CITRUS internal pull-up resistor is used, which means the brightness measurement will not be extremely accurate. The smaller the value, the brighter the light.
usb = Serial.new(0)
pinMode(14, 2) #INPUT_PULLUP
100.times do
usb.println(analogRead(14).to_s)
delay(100)
end
Sample 2
This sample offers a higher resolution. Although the default setting is 0~675, the resolution power is 0~4096.
usb = Serial.new(0)
analogReference(3) #12bit mode
pinMode(14, 2) #INPUT_PULLUP
100.times do
usb.println(analogRead(14).to_s)
delay(100)
end
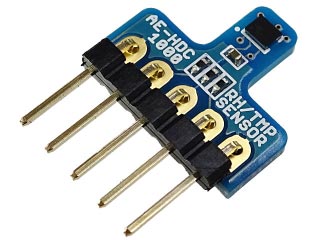
Temperature and Humidity
This sample uses the HDC1000 temperature and humidity sensor module.
Pin Connections
| Sensor | GR-CITRUS |
|---|---|
| +V | 3.3V |
| SDA | 5 |
| SCL | 6 |
| RDY | 2 |
| GND | GND |
Sample
This sample uses the I2C class to perform sensing 100 times.
@ADDRESS = 0x40
@RDY_PIN = 2
@T_POINTER = 0x00
@H_POINTER = 0x01
@C_POINTER = 0x02
@C_MSB = 0x10
@C_LSB = 0x00
usb = Serial.new(0)
i2c2 = I2c.new(2)
pinMode(@RDY_PIN, 0);
i2c2.begin(@ADDRESS)
i2c2.lwrite(@C_POINTER)
i2c2.lwrite(@C_MSB)
i2c2.lwrite(@C_LSB)
i2c2.end(1)
100.times do
i2c2.begin(@ADDRESS);
i2c2.lwrite(@T_POINTER)
i2c2.end(1)
while digitalRead(@RDY_PIN) == 1 do
end
i2c2.request(@ADDRESS, 4)
t = i2c2.lread() << 8;
t |= i2c2.lread();
t = t / 65536.0 * 165.0 - 40.0
h = i2c2.lread() << 8;
h |= i2c2.lread();
h = h / 65536.0 * 100.0
usb.print("T:")
usb.print(t.to_s)
usb.print(" H:")
usb.println(h.to_s)
delay(100)
end
Pin Connections: When Also Connecting WA-MIKAN
Pins 5 and 6 cannot be used when WA-MIKAN is also connected, so a separate I2C connection is employed. The following shows the sample using I2C1 (Wire1).
| Sensor | GR-CITRUS |
|---|---|
| +V | 3.3V |
| SDA | 0 |
| SCL | 1 |
| RDY | 2 |
| GND | GND |
Sample
This sample uses I2C class with I2C1 to perform sensing 100 times.
@ADDRESS = 0x40
@RDY_PIN = 2
@T_POINTER = 0x00
@H_POINTER = 0x01
@C_POINTER = 0x02
@C_MSB = 0x10
@C_LSB = 0x00
usb = Serial.new(0)
i2c = I2c.new(1)
pinMode(@RDY_PIN, 0);
i2c.begin(@ADDRESS)
i2c.lwrite(@C_POINTER)
i2c.lwrite(@C_MSB)
i2c.lwrite(@C_LSB)
i2c.end(1)
100.times do
i2c.begin(@ADDRESS);
i2c.lwrite(@T_POINTER)
i2c.end(1)
while digitalRead(@RDY_PIN) == 1 do
end
i2c.request(@ADDRESS, 4)
t = i2c.lread() << 8;
t |= i2c.lread();
t = t / 65536.0 * 165.0 - 40.0
h = i2c.lread() << 8;
h |= i2c.lread();
h = h / 65536.0 * 100.0
usb.print("T:")
usb.print(t.to_s)
usb.print(" H:")
usb.println(h.to_s)
delay(100)
end
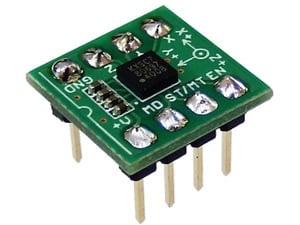
Accelerometer
This sample uses the KXSC7-2050 acceleration sensing module.
Pin Connections
| Sensor | GR-CITRUS |
|---|---|
| Vdd | 3.3V |
| Mode | 3.3V |
| ST/MOT | GND |
| Enable | 3.3V |
| Xout | 14 |
| Yout | 15 |
| Zout | 16 |
| GND | GND |
Sample
This sample uses a 12-bit analogRead to perform sensing 100 times, outputting a gravity-converted value.
usb = Serial.new(0)
@OFFSET = 1.65 / 3.3 * 4096 # 1.65V 0g
@CONVERT = 3.3 / 4096 / 0.66 # 0.66V/g
analogReference(3) #12bit
100.times do
x = (analogRead(14) - @OFFSET) * @CONVERT
y = (analogRead(15) - @OFFSET) * @CONVERT
z = (analogRead(16) - @OFFSET) * @CONVERT
usb.print("x: ")
usb.print(x.to_s)
usb.print(" y: ")
usb.print(y.to_s)
usb.print(" z: ")
usb.println(z.to_s)
delay(100)
end
Angular Rate
This sample uses the L3GD20 angular rate sensing module, with the I2C connection.
Pin Connections
| Sensor | GR-CITRUS | Notes |
|---|---|---|
| 1:VDD | 3.3V | |
| 2:SCL | 19 | External pull-up required |
| 3:SDA | 18 | External pull-up required |
| 4:SA0 | GND | Address 0x6a |
| 5:CS | 3.3V | I2C mode |
| INT2 | ||
| INT1 | ||
| GND | GND |
Sample
Copy and paste the GitHub sample to try this out.
Directional/Geomagnetic Sensing
This sample uses the HMC5883L digital compass, with the I2C connection.

Pin Connections
| Sensor | GR-CITRUS | Notes |
|---|---|---|
| 1:VDD | 3.3V | |
| 2:SCL | 6 | Close JP1 for pull-up |
| 3:SDA | 5 | Close JP1 for pull-up |
| 4:GND | GND | |
| 5:RDY | Not used in sample | |
| 6:NC | ||
| 7:NC | ||
| 8:NC |
Sample
This sample uses the I2C class to perform sensing 100 times.
#!mruby
# Digital Compass Module HMC5883L
# SCL -> 6
# SDA -> 5
# I2C Address(8bit): 0x3C(W)/0x3D(R)
# I2C Address(7bit): 0x1E = (0x3C >> 1) || (0x3D >> 1)
@ADDRESS = 0x1E
Usb = Serial.new(0)
Hmc = I2c.new(2)
#Set to continuous measurement mode.
Hmc.write(@ADDRESS,0x02,0x00)
#Hmc.begin(@ADDRESS)
#Hmc.lwrite(0x02)
#Hmc.lwrite(0x00)
#Hmc.end()
# ↓ When writing in 1 line ↓
Hmc.write(@ADDRESS,0x02,0x00)
100.times do
Hmc.begin(@ADDRESS);
Hmc.lwrite(0x03)
Hmc.end()
Hmc.request(@ADDRESS, 6)
xH = Hmc.lread()
xL = Hmc.lread()
zH = Hmc.lread()
zL = Hmc.lread()
yH = Hmc.lread()
yL = Hmc.lread()
x = ((xH << 8) + xL)
x -= 0x10000 if (x >> 15) == 1
y = ((yH << 8) + yL)
y -= 0x10000 if (y >> 15) == 1
z = ((zH << 8) + zL)
z -= 0x10000 if (z >> 15) == 1
Usb.println "x:"+x.to_s+" y:"+y.to_s+" z:"+z.to_s
delay(100)
end
Pin Connections: When Also Connecting WA-MIKAN
Pins 5 and 6 cannot be used when WA-MIKAN is also connected, so a separate I2C connection is employed. The following shows the sample using I2C1 (Wire1).
| Sensor | GR-CITRUS | Notes |
|---|---|---|
| 1:VDD | 3.3V | |
| 2:SCL | 1 | Close JP1 for pull-up |
| 3:SDA | 0 | Close JP1 for pull-up |
| 4:GND | GND | |
| 5:RDY | Not used in sample | |
| 6:NC | ||
| 7:NC | ||
| 8:NC |
Sample
This sample uses the I2C class to perform sensing 100 times. Change the I2C channel to 1 to support I2c.new(1).
#!mruby
# Digital Compass Module HMC5883L
# SCL -> 1
# SDA -> 0
# I2C Address(8bit): 0x3C(W)/0x3D(R)
# I2C Address(7bit): 0x1E = (0x3C >> 1) || (0x3D >> 1)
@ADDRESS = 0x1E
Usb = Serial.new(0)
Hmc = I2c.new(1)
#Set to continuous measurement mode.
Hmc.write(@ADDRESS,0x02,0x00)
#Hmc.begin(@ADDRESS)
#Hmc.lwrite(0x02)
#Hmc.lwrite(0x00)
#Hmc.end()
# ↓ When writing in 1 line ↓
Hmc.write(@ADDRESS,0x02,0x00)
100.times do
Hmc.begin(@ADDRESS);
Hmc.lwrite(0x03)
Hmc.end()
Hmc.request(@ADDRESS, 6)
xH = Hmc.lread()
xL = Hmc.lread()
zH = Hmc.lread()
zL = Hmc.lread()
yH = Hmc.lread()
yL = Hmc.lread()
x = ((xH << 8) + xL)
x -= 0x10000 if (x >> 15) == 1
y = ((yH << 8) + yL)
y -= 0x10000 if (y >> 15) == 1
z = ((zH << 8) + zL)
z -= 0x10000 if (z >> 15) == 1
Usb.println "x:"+x.to_s+" y:"+y.to_s+" z:"+z.to_s
delay(100)
end