電子工作入門:3 of 4
電子工作「どきどきウチワ」の3回目は、いよいよハードウェアの工作です。でも、ハンダ付けはしません。電子部品を基板に挿すだけのお手軽工作で電子回路を作りましょう!
使う部品を確認しよう
「どきどきウチワ」を構成する鍵となる電子部品は、「制御」を担う電子工作ボード「GR-SAKURA」と、心拍を「知る」センサ、そして、ウチワを「振る」サーボモータです。その他にもいくつかの電子部品を使用しますが、すべて簡単に入手できる汎用品だけで構成します(図1)。
また、「ブレッドボード」と呼ばれる試作や実験に用いる基板を使用するため、ハンダ付けが不要です。電子部品やジャンパワイヤを基板に差し込むだけで電子回路が完成します。とってもお手軽ですよ!

図1:「どきどきウチワ」の部品一覧(汎用部品のため、発売元は参考まで)
| 部品名 | 商品番号 | 販売元 |
|---|---|---|
| GR-SAKURA-FULL | 若松通商 | |
| 心拍センサ | SFE-SEN-11574 | スイッチサイエンス |
| 普通のジャンパワイヤ(オス~オス) | EIC-UL1007-MM-015 | スイッチサイエンス |
| SparkFun超小型ブレッドボード(白) | SFE-PRT-12043 | スイッチサイエンス |
| ブレッドボードで使えるDCジャック(2.1mm) | SSCI-DC-BB | スイッチサイエンス |
| サーボモータGWS MICRO/2BBMG/JRタイプ | M-01725 | 秋月電子通商 |
| カーボン抵抗(炭素皮膜抵抗)1/4W1kΩ | R-25102 | 秋月電子通商 |
| 汎用小信号高速スイッチング・ダイオード(60V150mA)1S2076A | I-03015 | 秋月電子通商 |
| セラミックコンデンサ0.1µF50V | P-05202 | 秋月電子通商 |
| 電解コンデンサ100µF25V85℃ | P-03122 | 秋月電子通商 |
| 2.1mmDCプラグ付バッテリースナップ | P-06687 | 秋月電子通商 |
| 電池ボックス単3×4本 横一列タイプ | P-02682 | 秋月電子通商 |
図1:「どきどきウチワ」の部品一覧(汎用部品のため、発売元は参考まで)
※他に、USBケーブル(GR-SAKURAとパソコンの接続用)と単3型ニッケル水素充電池(4本)が必要です。
上図を見ると、抵抗やダイオード、コンデンサといった電子部品を並んでいて少し不安になりますか?でも、大丈夫、難しく考えずに接続するだけです。使い方は本稿の後半で解説します。
また、「GR-SAKURA」はパソコンのUSBから供給される電力で動きます。しかし、サーボモータを動かすにはより大きな電力が必要なため、今回は、単3型ニッケル水素充電池を4本使います。これを収める「電池ボックス」や基板に導くための「DCプラグ付バッテリースナップ」、そしてブレッドボード上でプラグに接続するための「DCジャック」を用意しましょう。
回路図で仕組みを理解しよう
「どきどきウチワ」の回路図を図2に示します。心拍センサで得たドキドキ情報がアナログ信号(電圧の変化)として「GR-SAKURA」に搭載された「RX63N」マイコンのA/D変換器に送られ、アナログ信号をデジタル信号に変換、そしてその信号をマイコンが処理(プログラム/ソフトウェア)し、サーボモータへ制御の指示(パルス信号)を出力する仕組みです(詳しい仕組みの解説は電子工作入門(1)を参照してください)。
このように回路図とは、(1)部品の種別 (2)部品の定数 (3)部品の接続関係を表して、電子回路の働きと仕組みが理解できるようにするものです。
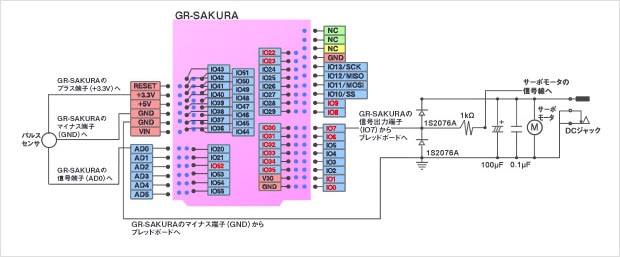
図2:どきどきウチワ回路図
「GR-SAKURA」については、「どきどきウチワ」に関する入出力のみ記載しました。
電子部品を挿すだけで出来上がり
それでは、実際の工作を順番に解説します。ハードウェアの工作というと大変な作業のようですが、この工作は30分程度で完成します、気軽に取り組みましょう!
1. 心拍センサの準備
センサの表側(指にあてる側)には、ハートの絵柄が印刷されています。ここに、同封されている透明な保護フィルムを貼って下さい。裏側は、端子がむき出しです。ここには、同封されている丸型のマジックテープを貼り、その上から帯状のマジックテープを巻くようにします。使用する時は、指の腹(指紋の中心がある近辺)にLEDの光が当たるようにマジックテープを巻いて固定します。(販売元の資料「Getting Started Guide」も確認しましょう)。

2. 心拍センサ~GR-SAKURAの接続
心拍センサから出ている3本のワイヤを図3のように「GR-SAKURA」に接続します。赤色を「GR-SAKURA」のプラス端子(+3.3V)へ、黒色をマイナス端子(GND)へと接続することで、心拍センサへの電源を「GR-SAKURA」から供給します。心拍センサからの信号は紫色のワイヤで「GR-SAKURA」の信号端子(AD0)へ入力します。
3. GR-SAKURA~ブレッドボードの接続
「GR-SAKURA」とブレッドボードの接続は、ジャンパワイヤ2本を使用します。1本目は、「GR-SAKURA」のマイナス端子(GND)とブレッドボードのマイナス端子を接続します。「GR-SAKURA」からの信号はIO7端子から出力しますので、2本目のジャンパワイヤでブレッドボードの入力端子へと接続しましょう。図3と図4の両方を参考にして下さい。
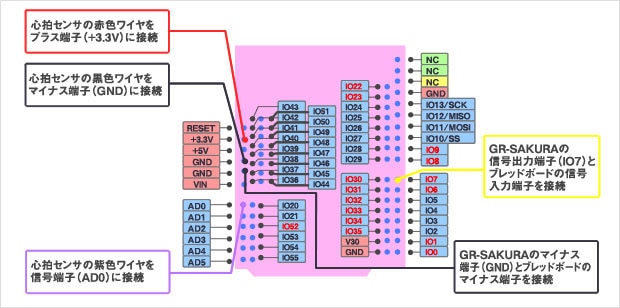
図3: GR-SAKURAの配線図
4. ブレッドボードの部品配置と配線
この作業が唯一、工具を使うところです。抵抗器やコンデンサ、そしてダイオードの脚(電子部品から出た金属線部分)は、ブレッドボードに挿すには長すぎますので、ニッパで切ります。脚を切りすぎてしっかりと挿入できないのは、接触不良が発生し誤動作の元になります。電子部品が浮いてしまっても大丈夫なので、多少の余裕をもって、長めに切っておきましょう。ジャンパワイヤが大回りして2つの穴を結んでも、気にすることはありません。下の図4をじっくりと見て、すべての部品をジャンパワイヤで接続をしましょう。
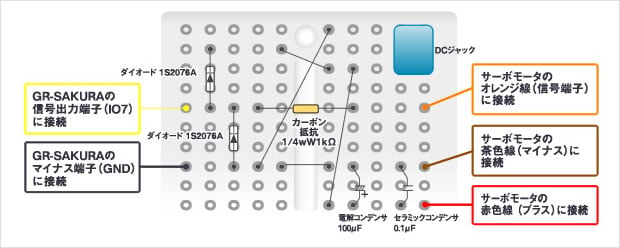
図4: ブレッドボードの部品配置と結線の図
ダイオードと電解コンデンサには極性があるので注意しましょう。
- ダイオードの黒帯の向きは、この図にあるように配線して下さい
- 電解コンデンサは、灰色の帯の先から出ている線がマイナスです
サーボモータからはオレンジ色と茶色、赤色の3本のワイヤが出ていますが、先端部分がコネクタになっています。コネクタの穴にジャンパワイヤを挿し、ブレッドボードと接続します。
ジャンパワイヤは、色とりどりですが、色の使い方にはおおまかな約束があります。電源のプラスは赤、マイナス(GND)は黒を使います。色の系統をルール付けて、混乱しないように気を付けましょう。
工作の山場!?心拍センサから出力される信号を確認しよう
まず、心拍センサの出力電圧がどれくらいなのかを見てみるために、出力をオシロスコープで測ってみました(図5)。(読者のみなさんは、工作にはオシロスコープは必要ありません)

図5:オシロスコープで計測した心拍センサの出力
計測時には心拍センサの電源電圧は5Vを使用しました。図5を見ると、出力電圧の幅は、心拍の動きに合わせて、1.5V程度から5V程度のアナログ信号(電圧の変化)を出力しているのがわかります。
ここで大切なポイントです!この心拍センサは最大で電源電圧と同等程度の電圧を出力するということです。「GR-SAKURA」に搭載しているマイコン「RX63N」のA/D変換器は、最大で3.3Vの入力電圧です。そのため、マイコンを壊さないように、センサの電源は「GR-SAKURA」の3.3V端子から得ることにしました。そうすれば、心拍センサの出力は、3.3V以内になるからです。また、その出力はアナログ入力可能なピン(AD0)に送ります(前述、心拍センサ~GR-SAKURAの接続)。
安全を第一に、保護を考える
今回は、マイコンでモータを動かすため、ちょっとした配慮が必要になります。まずは、ノイズ対策です。モータから発生したノイズが「GR-SAKURA」に影響を及ぼすと、誤動作の原因になります。そこで、電解コンデンサとセラミックコンデンサを並列につないで、電源ラインの電圧変動を抑えたり、ノイズを吸収したりする対策を図ります(工作のヒント(1))。
もう一つは、マイコンの保護。サーボモータを制御するPWM出力は「GR-SAKURA」の「IO7」端子から取り出します。この端子は、5Vの耐圧を持っているので、サーボモータの正常動作が保証されているのであれば、サーボモータの信号入力に直結させても構いません。しかし、不測の事態により「GR-SAKURA」にサーボモータから5V以上の電圧が逆流すると、マイコンを壊してしまいます。その対策として、モータ内で信号とグランドがショートしても過電流が流れないようにするために抵抗器(工作のヒント(2))を接続します。そしてモータに過電圧が生じたときのために、プラス側に逃がすようにダイオードを用います(工作のヒント(3))。
工作のヒント(1):コンデンサ
電気を蓄えたり(蓄電)、蓄えた電気を放出する(放電)受動素子。モータなどが急に電気を使った時、蓄えた電気を放出して電圧変動を抑える。電圧変動はノイズの元であり、変動が抑えられればノイズも小さくなり、マイコンへも影響しない。
工作のヒント(2):抵抗器
一定の電気抵抗値を得る受動素子。電流の流れを妨げることで、電流を制限する性質を利用して、過電流対策に使用しマイコンを保護する。
工作のヒント(3):ダイオード
一方向だけに電流を流す整流作用を持つ能動素子。今回は、サーボモータから過電圧や逆電圧が掛かったときにマイコンを保護する。
参考:

配線ミスが無いか、最後にもう一度確認して下さいね。
次回は、いよいよソフトウェアを作成して、実機を動かします。センサの出力から、どうやって「どきどき」の信号を検出するでしょうか? 完成まであと一歩、次回の「ソフトウェア開発編」をお楽しみに!
電子工作入門
- 必要な機能を考えよう!
- 見て、 触って、準備しよう!
- いよいよハードを組み立てよう!
- ソフトを作成して、どきどきウチワが完成