ブラシ付きDCモータ
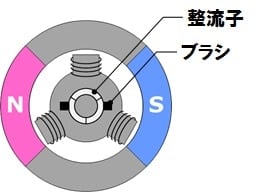
DC電源により駆動するため、単にDCモータとも呼ばれています。 永久磁石同期モータ (ブラシレスDCモータ)と区別するため、ここではブラシ付きDCモータと記述しています。 比較的安価で駆動も容易であるため、幅広い用途に使用されます。
ブラシ付きDCモータは整流子とブラシにより回転に連動して機械的に電流の流れる方向を切り替えることでトルクを生み出します。 弱点として、ブラシが摩耗するためメンテナンスが必要である点、電気的なノイズと機械的なノイズが発生する点が挙げられます。 マイコンなどによりPWMのデューティ比を調整することで印加電圧を変化させ、回転速度や位置を制御します。
アプリケーション
- 玩具
- 電動工具
- 車載電装品
永久磁石同期モータ (ブラシレスDCモータ)
ブラシ付きDCモータの弱点である整流子とブラシを取り除いたモータとして永久磁石同期モータ (ブラシレスDCモータ)があります。
ブラシがないため寿命やノイズの面で優れています。 また、制御により高効率化を実現できるため、省エネが求められる家電製品や、長時間駆動する産業分野に広く使用されています。
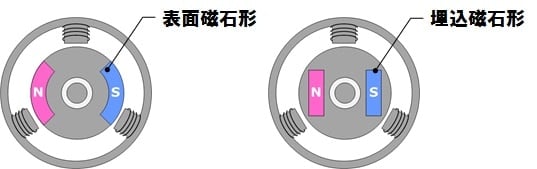
ロータへの磁石装着法の違いによって構造は下記2種類に大別されます。
- 表面磁石型(Surface Permanent Magnet:SPM):ロータ外周に永久磁石が張り付けられたタイプで、位置によらず透磁率が一定です。
- 埋込磁石型(Interior Permanent Magnet:IPM):ロータ内部に永久磁石が埋め込まれたタイプで、位置によって透磁率が変化するためリラクタンストルクを利用できます。
機械的に電流の流れる方向を切り替える機構がないため、インバータ回路により電子的に切り替える必要があります。 マイコンなどによりインバータ回路を駆動することで、固定子に三相の交流的な電圧を印加し回転磁界を生み出します。
駆動波形は大きく下記2種類に大別されます。
- 矩形波駆動:矩形波状の電圧を印加することで駆動します。
- 正弦波駆動:矩形波駆動の問題である振動、騒音やトルクリップルを抑えるために正弦波状の電圧を印加することで駆動します。 多くの場合、トルクや位相を線形独立に制御するためにベクトル制御を用います。 トルクが駆動電流に比例するため、位置・速度センサを付加することで、高速、高精度な位置・速度制御が可能になります。
効率よく駆動するためにはロータ(磁石)位置を検出する必要があり、 センサの温度制限やコスト面から、センサを用いず三相電流や誘起電圧からロータ(磁石)位置を推定する(センサレス位置推定)場合もあります。 センサの温度制限やコスト面から、センサを用いず三相電流や誘起電圧からロータ(磁石)位置を推定する(センサレス位置推定)場合もあります
一般的には、産業系ではセンサ付、家電系ではセンサレス位置推定が主に用いられます。
アプリケーション
- 空調機
- 洗濯機
- 冷蔵庫
- 電動工具
- サーボ
- ロボット
- コンプレッサ
- HDD
- 車載電装品
三相誘導モータ
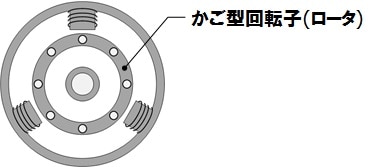
三相誘導モータは三相交流電源により駆動する誘導モータです。 固定子に三相交流を流すことで回転磁界が発生し、電磁誘導作用によって回転子に誘導電流が発生します。 この回転磁界と誘導電流によって電磁力が発生し回転子が回転します。 誘導電流が発生するためには回転子に対して磁界が移動する必要があるため、回転子の回転速度は回転磁界の同期速度より必ず遅くなります。 回転磁界の周波数と回転速度に相当する周波数の差をすべり周波数と呼び。 発生トルクはすべり周波数に比例します。
構造がシンプルで堅牢であり。 大電力のモータが作りやすく、比較的効率も良いため産業分野でよく使用されます。 ただし、前述のすべり周波数が発生するため、位置制御には不向きです。
工場などで使用される三相交流電源を直接入力することで一定速駆動する場合が多いです。 効率を重視する可変速省エネ用途では、インバータ駆動することで、トルクや回転速度を制御する場合もあります。
アプリケーション
- 産業機器
単相誘導モータ
単相誘導モータは名前の通り、単相交流電源で動作する誘導モータです。 単相交流では自己始動ができないため、始動のための工夫が必要になります。
始動方法の違いによって構造は下記3種類に大別されます。
- コンデンサ始動形 :コンデンサで分相し、2相交流電流を発生して始動トルクを得る構造です。
- 分相始動形 :インダクタンスの小さい始動用コイルを利用して始動トルクを得る構造です。
- くま取りコイル始動形 :くま取りコイルに発生する誘導電流を利用して始動トルクを得る構造です。
一般家庭などで使用される単相交流電源を直接入力することで一定速駆動する場合が多いです。 トライアックでAC電圧位相を制御することで回転速度を制御する場合もあります。
アプリケーション
- 冷蔵庫
- ファン
- 掃除機
- コンプレッサ
ステッピングモータ
ステッピングモータは固定子巻線へ印加する電圧パターンを切り替えることによって、ロータ位置がステップ状に回転します。 電圧パターンの切り替え回数と回転角度が正確に比例するため、フィードバック情報なしに位置制御が可能です。 弱点として、トルクが小さく、負荷の急変には対応できない点、振動を発生しやすく効率が高くない点が挙げられます。
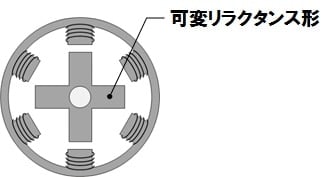
ステッピングモータの構造は下記3種類に大別されます。
- 可変リラクタンス形(VR形):スイッチトリラクタンスモータ(SRモータ)ともいいます。 磁石が無いため廉価ですが、効率が悪い欠点があります。
- 永久磁石形(PM形):永久磁石を使用しているため、比較的トルクが高く効率が高いです。 また、電流を流していない状態でも位置を保持できます。
- ハイブリッド形(HB形):VR形とPM形を組み合わせた構造で、比較的高いトルクと効率で分解能を両立したモータです。
駆動方式は下記4種類に大別されます。
- 1相励磁駆動 :順番にいづれか1相の巻線に電流を流すことで駆動します。
- 2相励磁駆動 :順番にいづれか2相の巻線に電流を流すことで駆動します。
- 1-2相励磁駆動 :1相励磁と2相励磁を組み合わせることで2倍のステップ角で駆動します。
- マイクロステップ駆動 :相毎に流す電流の大きさを正弦波的に変えることで高分解能なステップ角で駆動します。
アプリケーション
- OA機器
- カメラ
- 産業機器