概要
設計・開発
関連ボード&キット

Development
RTP8A779F0ASKB0SP2S
アクティブ
R-Car S4 開発ボード / Spider
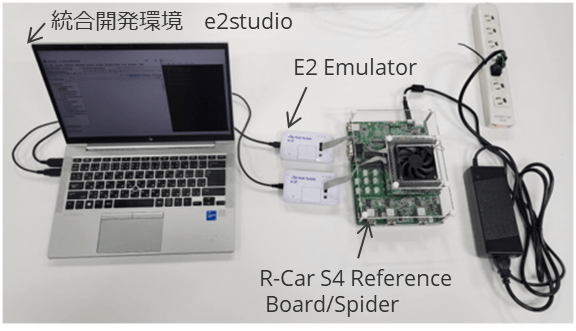
新しいE/Eアーキテクチャへの対応を実現するため、車載ゲートウェイアプリケーション用のハードウェア、ソフトウェアを完備した開発環境を提供します。

Development
R-Car用ソフトウェア開発キット
R-Car SDK(Software Development Kit)は、ADASや自動運転システムのディープラーニングによるソフトウェア開発を加速する使いやすい開発フレームワークです。
車載アプリケーションのためにソフトウェア開発を再構築
自動車メーカは、次世代の車載スマートカメラアプリケーションや自動運転システムを実現するために、ディープラーニングの活用を模索しています。ディープラーニングソリューションの多くは、民生用アプリケーションやサーバアプリケーションをベースに構築されており、車載用途に求められる機能安全性やリアルタイム応答性、低消費電力などの厳しい制約の下では...
推奨ドキュメント:
ビデオ&トレーニング
Introduction of Multi-Core Synchronous Debug Tool
Video List

SOC開発時のデバッグでの課題
車載ECU、特にセントラルECUなどの高度な処理を備えたECUには、1つのSOC内に複数のコアが装備されており、これらは連携して動作します。複数コア上で動作するソフトウェアを組み合わせて動作させた場合、どのソフトウェアが問題を発生させているかを特定する際に時間がかかります。
従来の開発ツールを使用した課題について事例を以下に説明します。
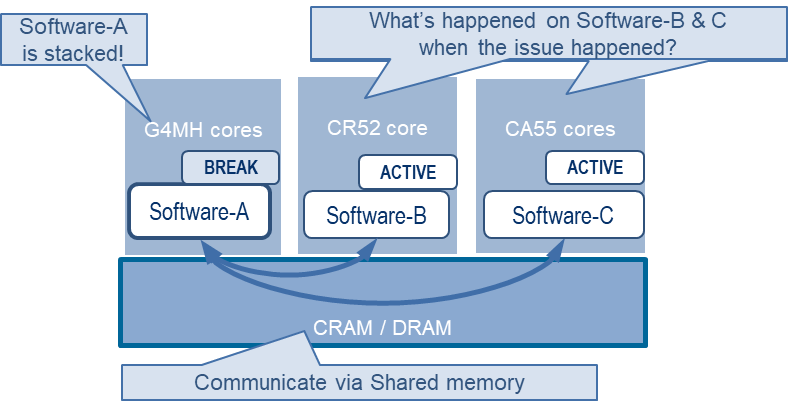
右図で、一番左のG4MH coreで動いているSoftware-Aに何か異常が起きて、デバッグしようとしたとき、従来であればG4MH coresの動作を止めて、レジスタやメモリ、変数の状態をデバッガを使って調べる、というのはよく行う方法です。ところが、G4MH coreの動作を止めても、他のコアはそのまま動いてますので、Software-Aで問題が起きた時にSoftware-BやCで何が起きていたのか見ようとしても、Software-BやCはもっと先に進んでしまっているか、場合によってはSoftware-Aを止めていることで動作がおかしくなってしまい、肝心の問題点にたどり着けない、ということが起こりえます。
Multi-Core Use Case
画像
特徴
- ユースケースと期待される効果
- R-Car S4に集積された、ヘテロジニアスな複数の異種プロセッサコア(Arm core(CR52,CA55)/ RH850 core(G4MH)) を同時にデバッグ、トレースすることが可能。これにより、複数のコアが連携して機能を実現するシステムにおいて原因特定や問題解析の時間を短縮できます。
画像
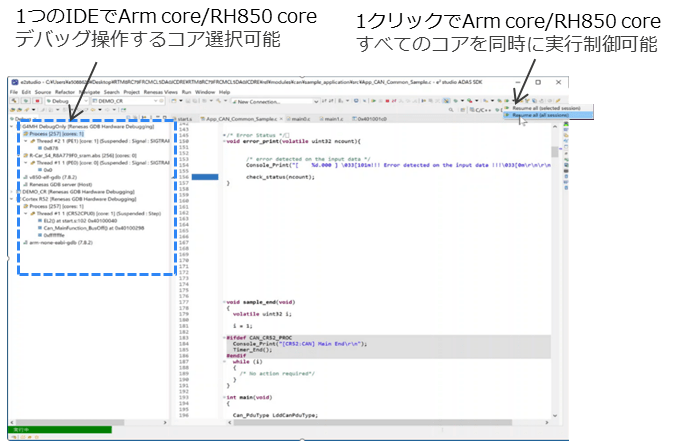
主な機能
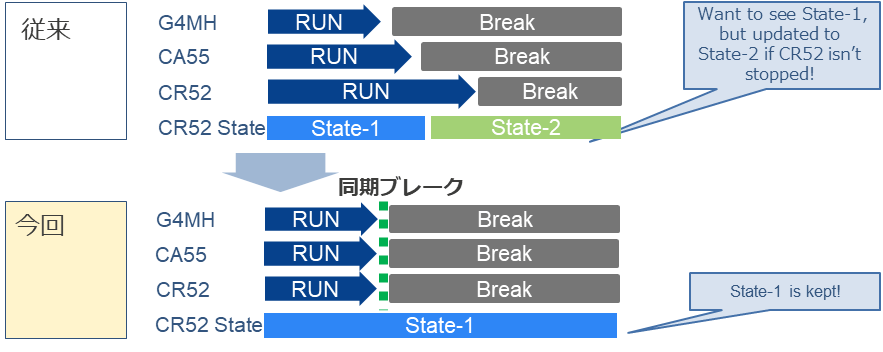
- 同期実行制御
- 同期ブレークを行うことにより想定外の動作やバグの状態を参照することが容易になります。
例:問題事象(CR52 State-1)が発生したときのSOC内部のS/W変数やI/Oの状態を参照し、問題事象の特定したいケース
画像
画像
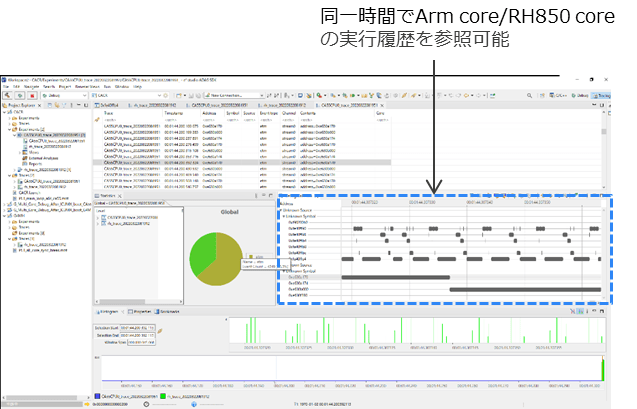
- 同期トレース
- 各コアのSWの動作の流れを同時に同期して確認することにより、問題が発生する状態を把握することが容易になります。
画像