
Overview
Description
These resolver-based motor control solutions are motor control systems for industrial and consumer applications realized by combining resolver-to-digital converter (RDC) ICs and RX Family microcontrollers (MCUs). It is possible to easily control a resolver-based stepping motor or brushless DC motor using the driver software of the microcontroller. Solution kits, sample code, development support tools, and application notes for motors with resolvers are available, and motor control using resolvers can be started immediately.
Features
- High-precision motor control is possible even in harsh environments with heat, dust, or vibration.
- Realize high-precision control at low cost using a new type of resolver control with superlative cost performance.
- Resolver signal gain, phase, and angle error are automatically corrected through the driver API that can be used in combination with an RX MCU to achieve high precision.
System Configuration
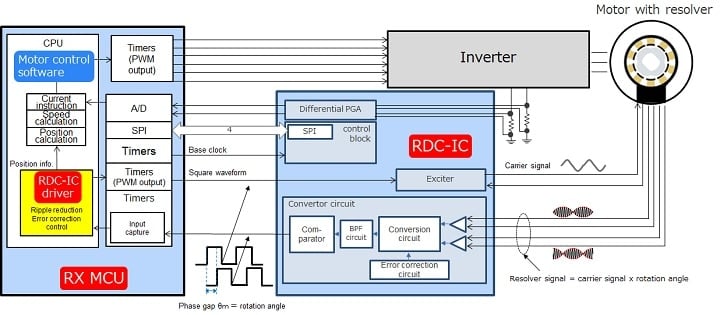
In resolver-based motor control solutions, the RDC IC and RX MCU process signals from the resolver as angle information, and the RX MCU controls the motor. A dedicated driver for the RDC IC is provided on the RX MCU, and resolver processing can be easily performed using the API.
Compatible Resolvers and Motors
- Drivers for stepping motors and brushless DC motors are available. Normally, it is difficult to use a resolver sensor with a stepping motor due to the effect of electromagnetic noise, but these solutions address this with noise countermeasures.
- These solutions are compatible with voltage detection type resolvers and current detection type resolvers. The resolver needs to be a one-phase excitation two-phase output type resolver. Not only general voltage detection type resolvers, but also current detection type resolvers that can be manufactured at low cost can be used.
Motor Control Solutions for Stepping Motors With Resolvers
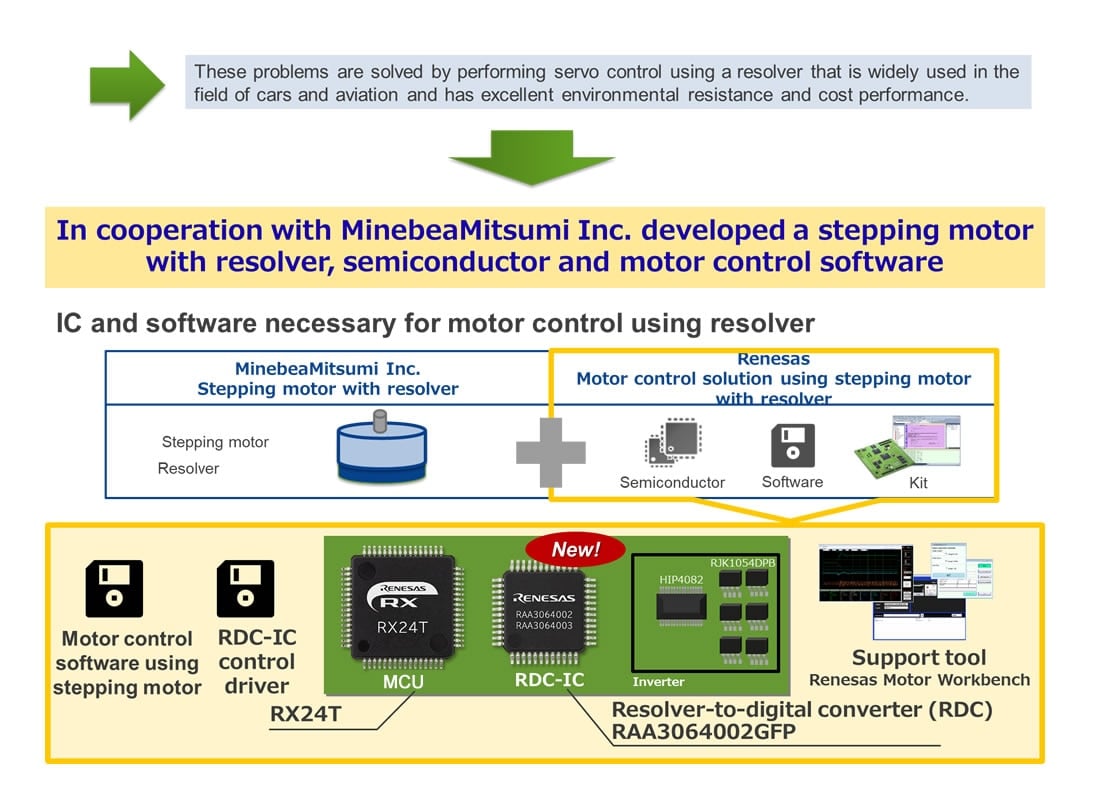
- Stepping motors with resolvers and resolver motor control solutions developed by collaboration between MinebeaMitsumi Inc. and Renesas make possible servo control for stepping motors that are normally controlled by open loop control.
- These solution realize many advantages such as low noise, low vibration, low power consumption and maximization of motor torque.
Challenges Faced by Conventional Motor Solutions
- Need to select a larger motor to ensure torque step-out margin
- Stepping motors that use open loop control consume large current and generate large amounts of heat
- Torque ripple causes vibration and noise
Solution Contents
- Stepping motor with resolver: New motor manufactured by MinebeaMitsumi Inc.
- RX24T: MCU for motor control
- Resolver-to-digital converter: IC that converts resolver output into digital signal
- Solution kit: All items necessary for controlling a stepping motor with resolver are provided
What These Solutions Provide
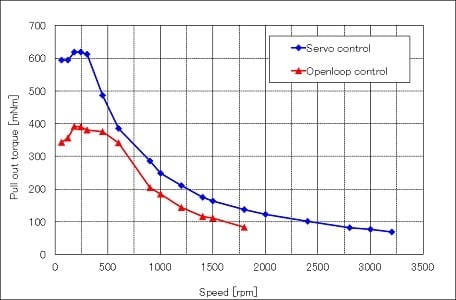
Maximization of Motor Torque
- By performing servo control, a motor can be used up to maximum torque, and high-speed rotation can be supported. Since you can select a motor simply based on the required torque without considering the step-out margin, motor size can be reduced compared to open-loop control methods.
Low Power Consumption
By performing servo control using a resolver, standby current can be reduced significantly, and only the current necessary for the load is consumed. In addition, the heat generation of the motor can be suppressed by reducing the current consumption.
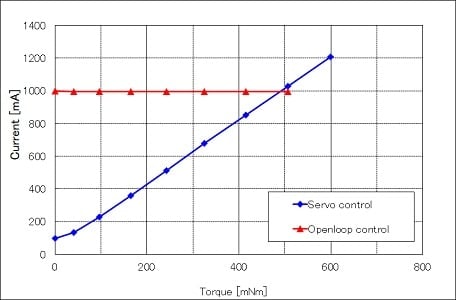
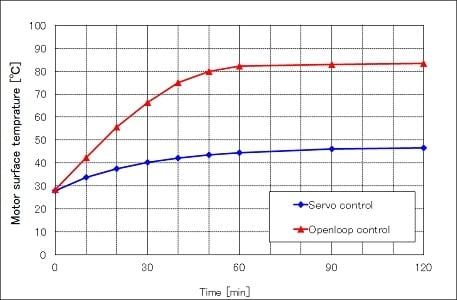
Since motor loses steps with load torque of 500mNm or more during open-loop control, no data has been acquired.
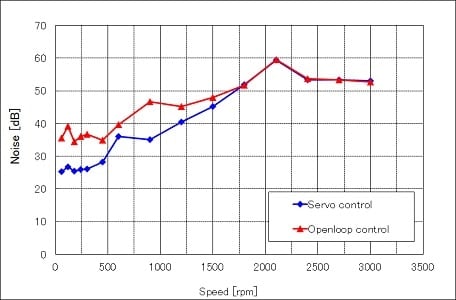
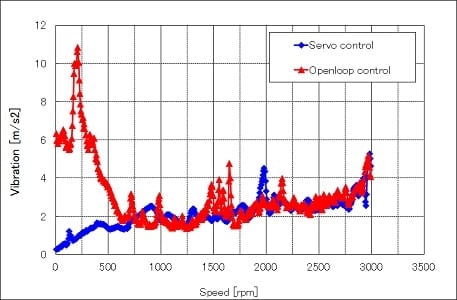
Low Noise and Low Vibration
Compared to open-loop control, noise and vibrations up to the medium speed range can be suppressed by performing servo control using a resolver.
Reference Guide for 2-Axis Arm Robots
We have created a reference guide for a 2-axis arm robot using a motor control solution for stepper motor with resolver.
Features
- Numerical control (NC) is achieved with the RX72M and motor control of each axis with the RX24T.
- Arm trajectory control (controlled path control or CP) enables continuous operation of any path at speeds up to 250mm/s in a 150mm x 153mm range of motion.
- The high position resolution (200,000P/R) of the resolver enables ±0.2mm positioning accuracy.
Public Items
- Reference guide for 2-axis arm robots
- NC control, motor control sample program
- Arm robot structural drawing
- 42mm square motor control board schematic diagram, pattern diagram and bill of materials
- 85mm square motor control board schematic, pattern diagram and bill of materials
- PC GUI tools for demo
Schematic diagram
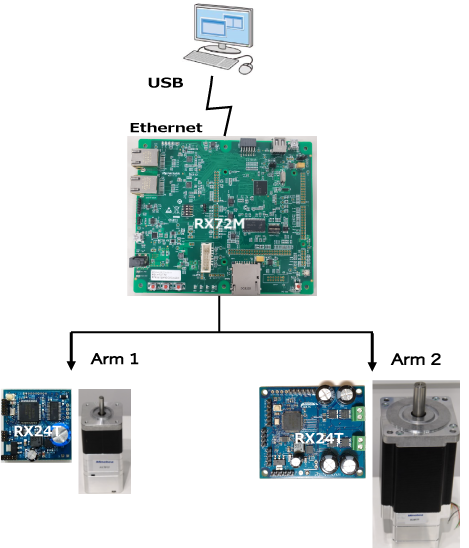
- GUI (PC)
- Teaching
- Demo action execution
- NC Control Board
- Trajectory control
- Interpolation operations (linear interpolation, arc interpolation)
- Acceleration and deceleration operation (moving average filter)
- Joint angle operation (sequential Jacobian operation)
- Single axis movement (no interpolation, angle specification)
- Continuous motion capability (combined operation of linear movement and arc movement)
- Trajectory control
- Communications
- RS-485, half-duplex Modbus communication (1Mbps)
- Motor used
- 2-phase stepper motor
- Resolver
- Position resolution of 200,000 P/R
- Motor control
- Position, speed, current vector control
Application Notes
Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev. 1.00 (PDF | English, 日本語)
Reference guide
RX24T, RX72M, RAA3064002GFP/RAA3064003GFP Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev.1.00 - Sample Code (ZIP | English, 日本語)
Demo Video
Comparison
Applications
Related Boards & Kits

Evaluation System for Stepping Motor with Resolver
This solution kit allows you to easily evaluate and study the RX family and resolver to digital converter (RDC) ICs provided by Renesas. A stepping motor with resolver is included, and evaluation can be started immediately after purchasing the kit using software that can be downloaded from the... Read More
Software
Software Downloads
| Type | Title | Date |
|---|---|---|
| Sample Code | [Toolchains=CC-RX|V3.04.00] ZIP 101.88 MB 日本語 Application: Motor Drives Compiler: CC-RX IDE: CS+, e2 studio | |
| Sample Code | ZIP 81.81 MB 日本語 Compiler: CC-RX IDE: CS+, e2 studio | |
| Sample Code | ZIP 22.06 MB 日本語 Compiler: CC-RL Function: Application Example IDE: e2 studio This sample code is sample software for tuning and GUI-based demo operation of a 2-axis robot arm system. The system consists of RX72M-based robot arm trajectory control software and RX24T-based motor control software. | |
3 items | ||
Videos & Training
Support

Support Communities

