
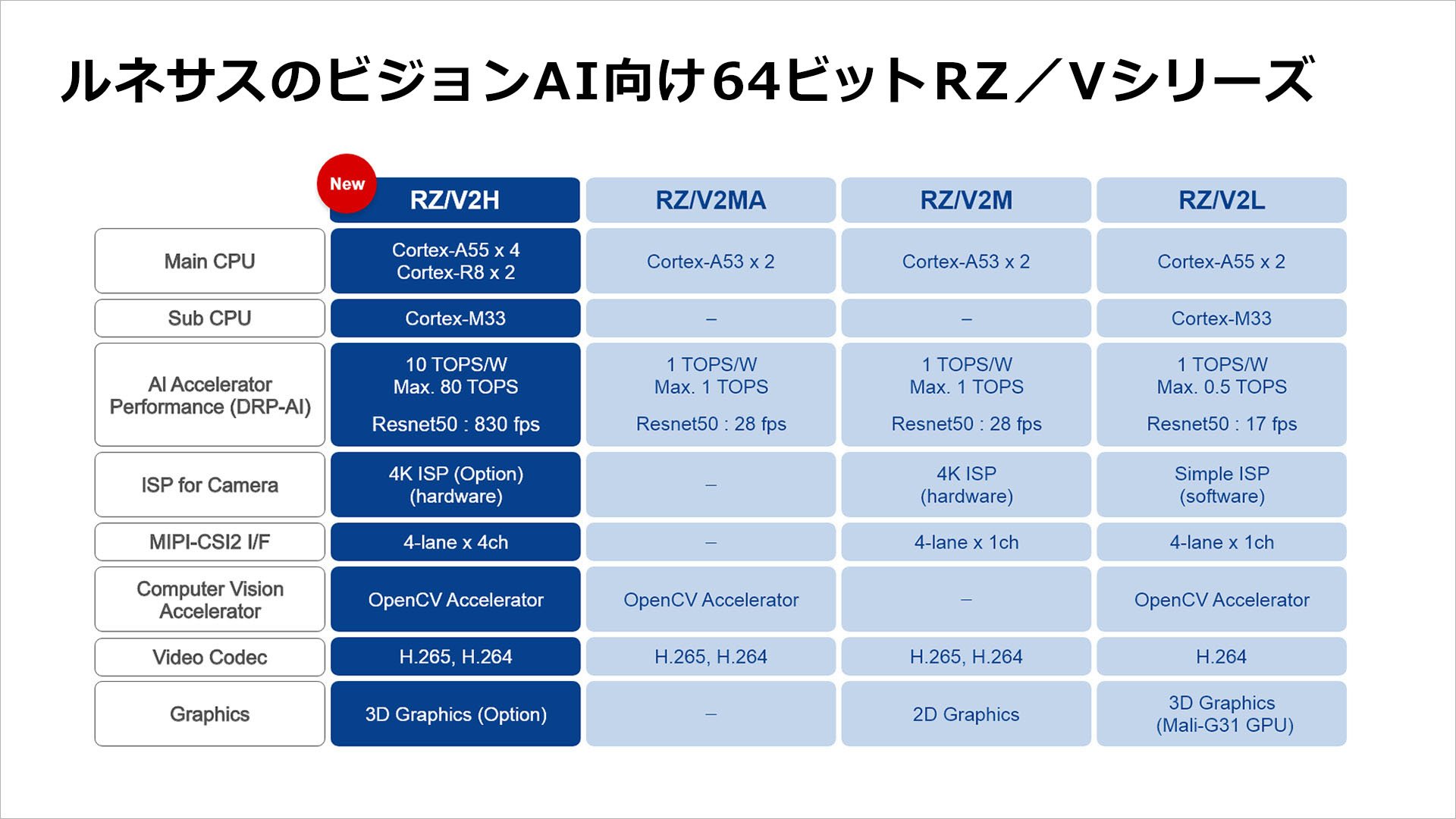
ルネサス エレクトロニクス株式会社(代表取締役社長兼CEO:柴田 英利、以下ルネサス)は、このたび、ルネサス独自のAIアクセラレータ「DRP(動的再構成プロセッサ)-AI」を内蔵したマイクロプロセッサ(MPU)「RZ/Vシリーズ」を拡充し、最もハイエンドな製品となる「RZ/V2H」を発売、量産を開始しました。新製品には、新世代のAIアクセラレータ「DRP-AI3」を搭載し、電力性能を従来の10倍高め、10 T0PS/Wを実現しました。また、DRP-AI3には、AIの演算効率を向上するプルーニング(枝刈り)技術を適用したことにより、最大80 TOPSのAI推論性能を実現しました。この性能向上により、画像AIアプリケーションをクラウドAIを使わずにエッジAIだけで実現できます。
RZ/V2H のCPUは、アプリケーション処理のLinux用に最大動作周波数1.8GHzのArm® Cortex®-A55を4コアと、高速リアルタイム処理のRTOS用に800MHz動作のCortex-R8 を2コア、サブCPUとしてCortex-M33を1コア搭載しました。これらにより次世代ロボティクス制御のために必要となるとなるビジョンAIと高速リアルタイム制御を1チップで実現します。さらに、RZ/V2Hは低消費電力のため冷却ファンなどの放熱部品が不要なことから、機器の小型化とシステムコストの低減、信頼性の向上が可能です。
ルネサスのエンベデッドプロセッシング第一事業部、事業部長のDaryl Khooは次のように述べています。「ルネサスはモータ制御用プロセッサの分野で確固たる地位を確立しており、今まさにロボティクス市場にAIで革命をもたらそうとしています。新たなRZ/V2Hによって、ビジョンAIによる目を持ち、自ら考えてリアルタイムに動くことのできる、まさに自律型の次世代ロボット開発を可能にします。」
ルネサス独自のDRP技術をAI以外にも応用し、画像処理のためのオープンソース業界標準ライブラリOpenCVの処理をCPUに比べて最大16倍高速化するOpenCVアクセラレータを開発、搭載しました。DRP-AI3とこのOpenCVアクセラレータにより、RZ/V2H はAIと従来の画像処理アルゴリズムの両方を高速化できるため、ロボット掃除機などの自律型アプリケーションで使われるVisual SLAM(注1)を、高い電力効率でリアルタイムに実行する事ができます。
また、AIアプリケーションを短期間で開発できるよう、各種ユースケースに応じた学習済みモデルのライブラリ「AI Applications」と、AIを使ったユーザアプリケーションの開発を短期間で行える「AI SDK(Software Development Kit)」をリリースしました。これらをRZ/V2Hの評価ボードで動作させることにより、AIに関する深い知見が無い場合でも、AIアプリケーションを早期に評価することが可能です。
SEGGER Microcontroller GmbHの創設者のRolf Segger氏は、次のように述べています。「私たちは、AI技術とリアルタイム制御の融合を実現するRZ/V2H が発売されることを嬉しく思います。世界中の多くの組み込み開発で採用されているSEGGERのデバッグツールJ-LinkがRZ/V2Hをサポートすることにより、お客様の革新的な次世代ロボティクス開発を加速させることができます。ルネサスとの数十年にわたるパートナーシップの次のステップを楽しみにしています。」
ウィニング・コンビネーション
ルネサスは、カメラ映像から周囲の状況を把握し、リアルタイムに動作を判断、制御する「ビジョン検出シングルボードコンピュータ」を開発しました。本ソリューションには、RZ/V2HとパワーマネジメントIC、プログラマブルクロックジェネレータVersaClockなどのルネサス製品が含まれており、電力効率の高い産業用ロボットや機械を開発可能です。ルネサスのウィニング・コンビネーションは、ルネサス製品を最適に組み合わせてエンジニアによる設計検証を行っているため、ユーザの設計のリスクを低減し、市場投入までの時間を短縮します。様々なアプリケーションに向けた400種類以上のウィニング・コンビネーションについて、詳しくはこちらをご覧ください。https://www.renesas.com/win
RZ/V2Hの詳細は、こちらをご覧ください。
https://www.renesas.com/rzv2h
RZ/V2Hには、ISSCC 2024で採択されたDRP-AIなどの技術が採用されています。詳細はこちらをご覧ください
以 上
(注1)Visual SLAM(Simultaneous Localization and Mapping)とは、カメラからの画像を元に、自己位置の推定と周囲の環境地図作成を同時に行う技術で、自律走行型ロボットやドローンに活用されます。
*なお、本製品は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の委託業務の成果を一部活用しています。
*Arm とArm Cortexは、Arm Limited(またはその子会社)のEUまたはその他の国における登録商標です。本リリース中の製品名やサービス名は全てそれぞれの所有者に属する商標または登録商標です。
ニュースリリースに掲載されている情報(製品価格、仕様等を含む)は、発表日現在の情報です。 その後予告なしに変更されることがございますので、あらかじめご承知ください。