
E/E architecture systems for next generation cars are evolving around electrification and autonomous driving. The figure below illustrates the evolution of E/E architecture control systems.
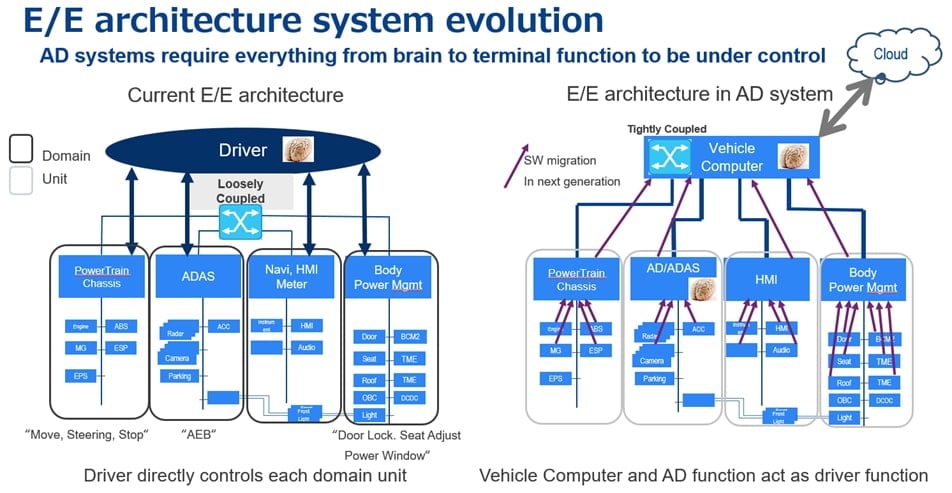
Since the current E/E architecture control system has a configuration in which the driver directly controls each functional domain, communication between each domain is loosely coupled, and the domains are made relatively independently in order not to be influenced by other domains. On the other hand, in the E/E architecture control system of the autonomous driving era, the communication between each domain becomes relatively large (tightly coupled) because the central control system called the vehicle computer controls the autonomous driving function instead of the driver, and the communication between domains becomes relatively large. In addition, since the scale of the control program increases exponentially, OTA (Over-the-Air) in a safe form is indispensable, and in order to ensure control by OTA, the SW targeted for OTA will be changed from the terminal HW to the central HW. (Purple arrow) Communication between the central control system and Cloud is also a prerequisite for the system.
The Impact of Power Consumption of AD ECU in Electric Vehicles
Next, we will explain the issues regarding the power consumption of autonomous driving in EVs.
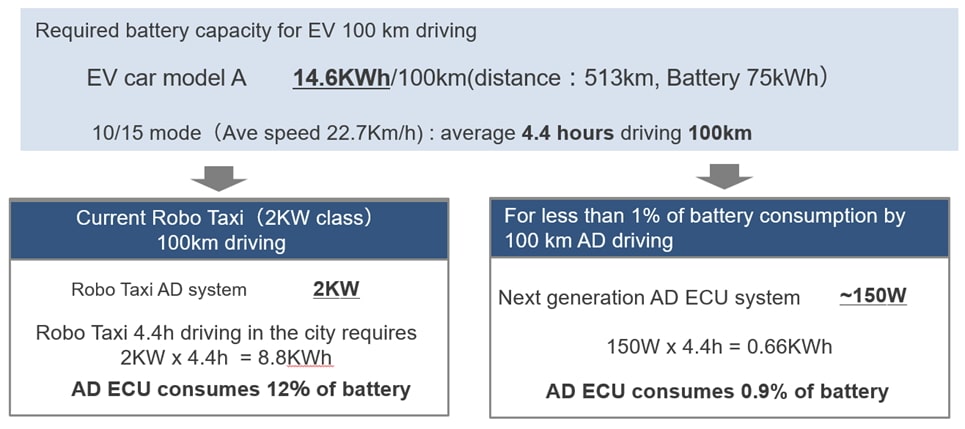
Let’s consider the battery capacity required for a typical EV vehicle to travel 100 km. For example, when driving in EPA City mode, 100km consumes 14.6KWh of power, but when driving in the city at an average speed of 22.7km/h, it takes 4.4 hours to drive 100km. Considering the current Robo taxi, assuming that the power consumption of the entire automatic driving function is about 2KW, 8.8KWh of power is required for 4.4 hours of driving, and if the battery installed in this EV vehicle is 75KWh and 100Km of automatic driving will be performed, in the meantime, the autonomous driving function is consuming 12% of the battery capacity. In order to reduce the consumption of this battery capacity to 1% or less, the power consumption of the entire automatic driving function must be 150W or less. You can see from this figure how important it is to reduce the power consumption of deep learning, which consumes the most computing power in autonomous driving. And as the fields of application of deep learning will continue to increase, this improvement will become more important from the perspective of SDGs and ESG.
Performance optimization by heterogeneous computing of automotive edge devices
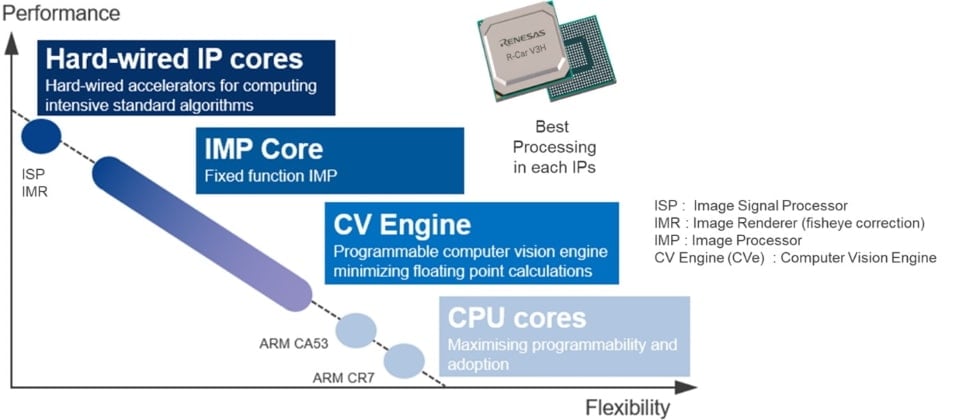
Unlike CPUs and GPUs used in data centers, edge devices have strict power and target cost constraints. As a result, edge devices require a heterogeneous architecture that combines HWs with optimal functionality or application-specific processors for the target application. Therefore, in the field of ADAS / AD, the R-Car V series provides LSIs that combine HW IP, programmable processors, and CPUs. The figure below is an example of the hardware configuration of R-Car V3H.
The Adoption of Streaming Architecture
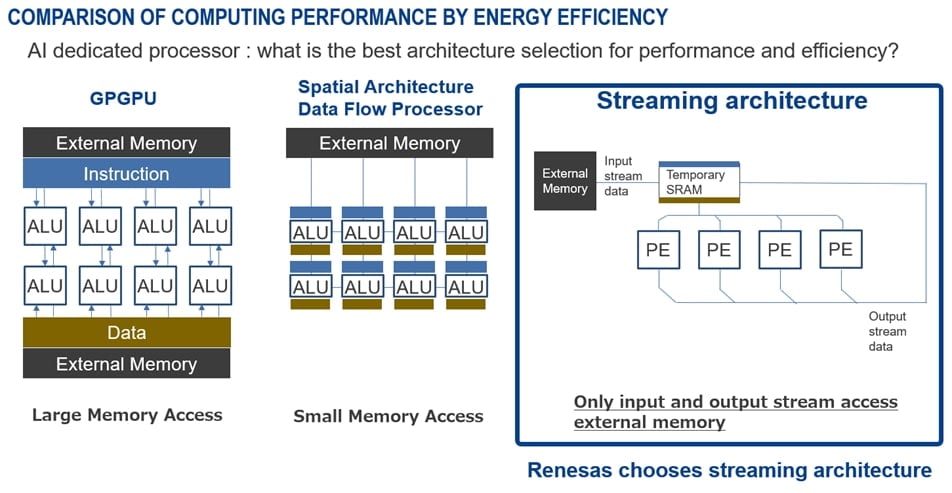
Deep learning engines (CNN-IP) in the ADAS / AD field require high TOPS values, and lowering the power of CNN-IP is a major factor in determining the power of the entire chip. That's why Renesas uses the most power-efficient Streaming architecture of the various architectures. In Streaming Architecture, CNN-IP minimizes access to external memory and performs efficient data transfer between each PE (processor element) and SRAM with low power.
The LSI power target during deep learning of Renesas ADAS / AD is 5W or less for the front camera ECU and 30W or less for the central ADAS ECU, enabling air-cooled heat dissipation of the system. These power targets are important indicators for the practical application of ADAS / AD systems in mass-production vehicles.
Renesas AI Architecture in the Automotive Segment
In the field of autonomous driving, the use of deep learning will continue to progress, and it will be important to support new networks. Therefore, Renesas is continuing to develop the AI computing architecture for automotive applications, which is a form that adds a programmable processor for specific purposes in addition to the Streaming architecture. By processing convolution operations, activation, pooling processing, etc., which account for more than 95% of the current deep learning, on the Streaming processor side, and handling new functions on the programmable processor side, we pursue both low power and flexibility of deep learning processing.
Finally, we would like to introduce the development tools that are indispensable for the application development of AI solutions for automotive. As shown in the figure below, AI for automotive requires different development environments for various applications such as cameras, gateways, and central ADAS, and we provide turnkey solutions and application development tools with leading partners who have been collaborating with the R-Car consortium for many years.
For more information, please check the R-Car Consortium website.
