
レーダートランシーバー:ADAS/自動運転のキーコンポーネント
- Blog 1: レーダーはなぜ必要か?
- Blog 2: FMCWレーダーの基本
- Blog 3: 距離測定:レーダーはどこまで検知できるか?
- Blog 4: レーダーの解像度:レーダーはどの程度の精度が出せるのか?
- Blog 5: レーダーアーキテクチャ:複数のレーダーセンサーを接続する
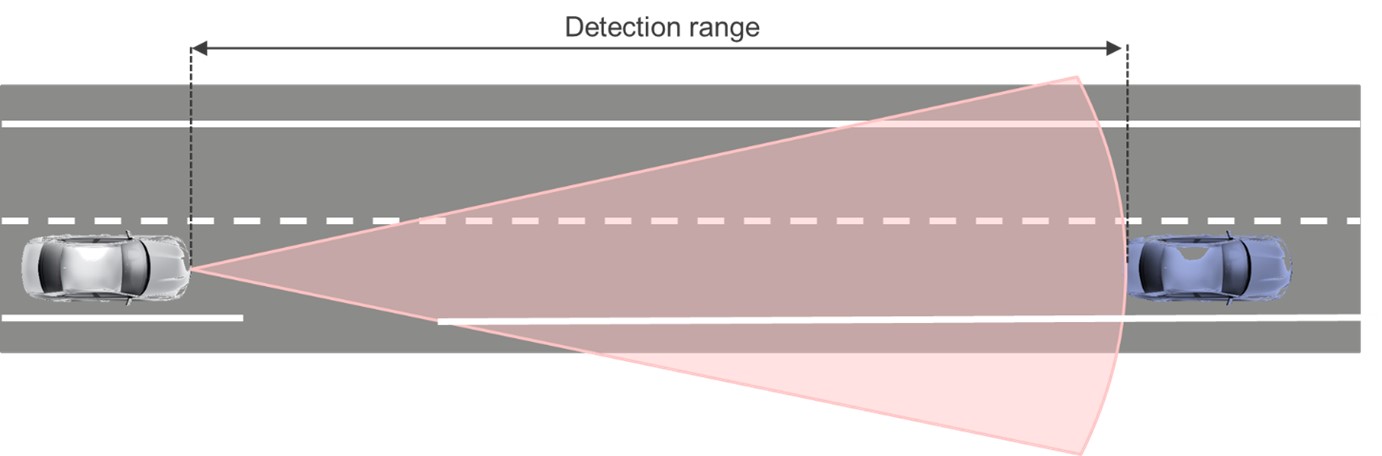
車載用レーダーを紹介するシリーズのこれまでのブログでは、レーダーを搭載する理由とFMCW(周波数変調連続波)レーダーの動作原理を紹介しました。今回は、レーダーシステムの性能である最大検知距離、つまり「前方の障害物をどこまで検知できるか」について見ていきます。障害物を検知して必要な行動を取るためには、できるだけ早く予見することが求められます(図1)。この検知距離を伸ばすには、レーダーMMICのどのパラメータを最適化すればいいでしょうか。
もちろん、用途により、検知距離への要件は異なります。例えば、ロングレンジレーダー(LRR)では、高い解像度や広い視野角は必要ありませんが、できるだけ遠方まで検知することで、高速走行時でも反応時間を確保して事故を防ぐことを目指します。一方、ショートレンジレーダー(SRR)は、より高い解像度で広く見通す必要がありますが、このような構成であっても、数センチでも検知距離を延ばすことができれば、都市部や混雑した駐車場などの複雑な走行環境での事故を防ぐことができます
1.1 レーダー検知距離とレーダー方程式
レーダーの検知距離には、設計者がコントロールできない多くの要因が影響します。そのため、最初のステップとして、電磁波の伝搬とアナログフロントエンドに関する基本的な関係を理解する必要があります。
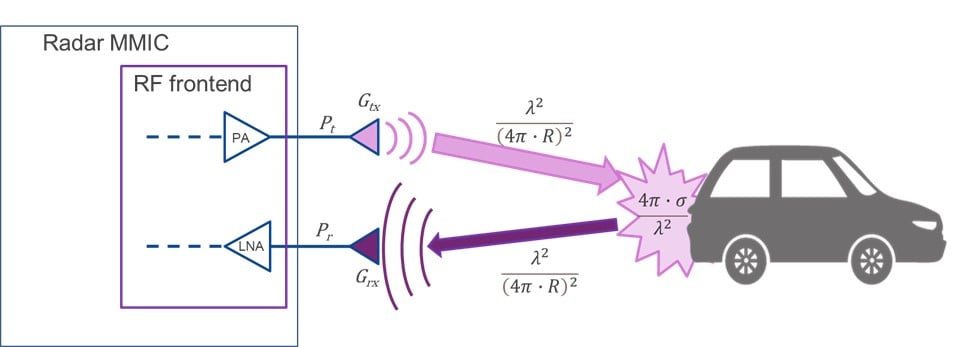
レーダーの伝搬距離RはレーダーMMICトランシーバーのRF性能と直接関連しており、そのリンクバジェットはレーダー方程式と呼ばれ、送信フロントエンドの出力電力(Pt)、送受信アンテナの利得(GtxおよびGrx)、動作周波数(波長λとする)、ターゲットのレーダー断面積(σ)の関数として、RF受信フロントエンドで受信する電力Prを表します。

λ4/(4π∙R)4 は双方向の自由空間損失を表し、 (4π∙σ)/λ^2 はターゲットで反射される電波の度合いを表しています。リンクバジェットとレーダー方程式の各項目との関係を図2に示します。
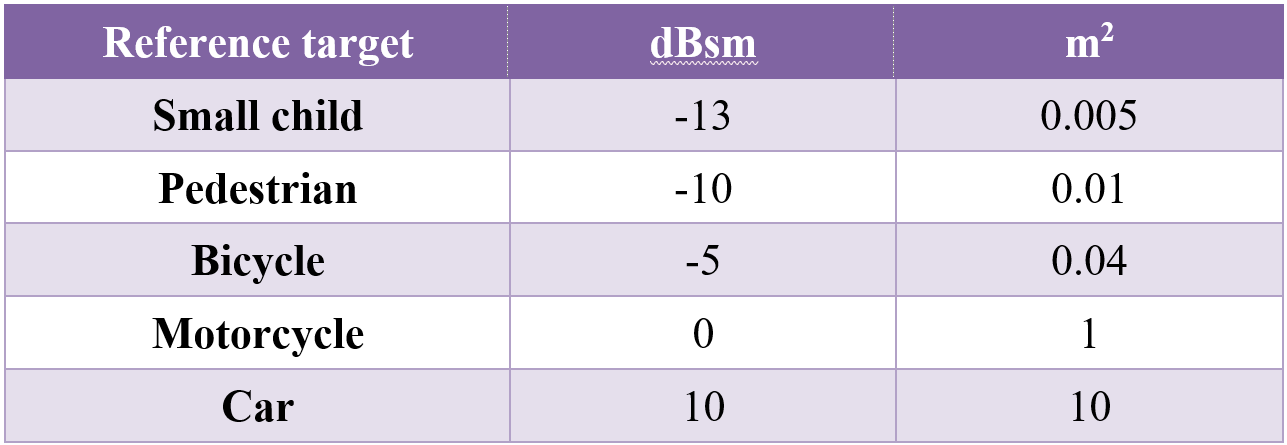
欧州電気通信標準化機構(ETSI)は、システムリファレンス (SRDoc) ETSI TR 103 593 V1.1.1(2020-05)「Transmission characteristics; Technical characteristics for radiodetermination equipment for ground based vehicular applications within the frequency range 77 GHz to 81 GHz」の中で、各レーダー動作モードにおけるアンテナ利得と受信部の最小検出電力(-110dBm)の推定値を示しています(表1参照)。また、代表的なターゲットのレーダー反射断面積の参考値も記載されています(表2)。
表 1: レーダーアンテナ利得の推定値 ETSI TR 103 593 V1.1.1 (2020-05) (Gtx=Grx とする).
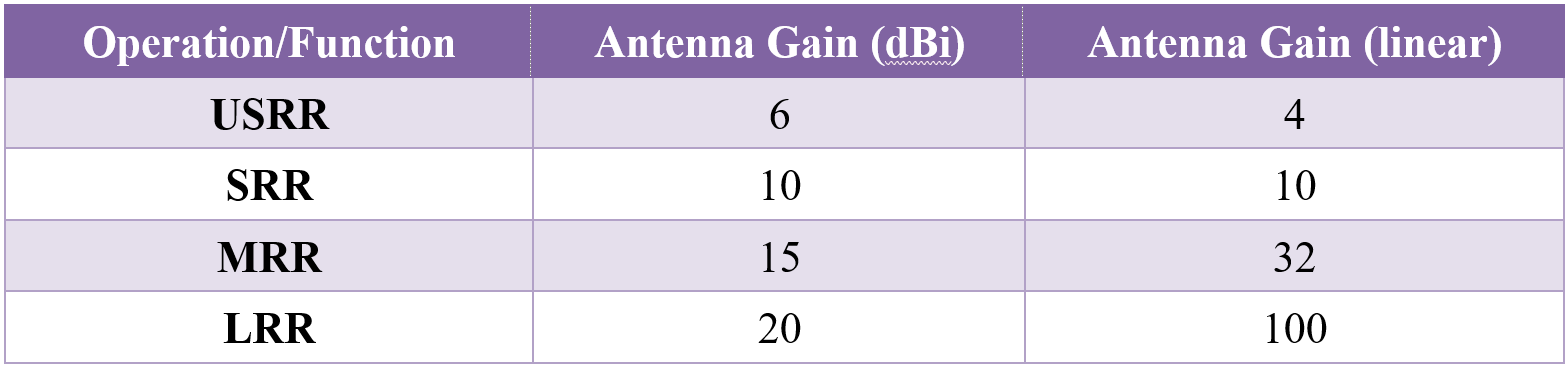
表 2: レーダー反射断面積 ETSI TR 103 593 V1.1.1 (2020-05).
この値は、さまざまなレーダーシステムの理論的な性能を評価、比較するための基準値として使用できます。
1.2 レーダー MMIC
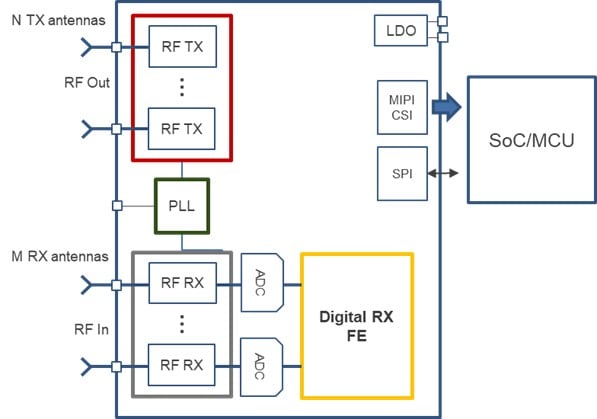
現在、これらのトランシーバーはシリコンRFIC(Radio Frequency Integrated Circuits)であり、1つのチップにさまざまな機能を集積できるだけでなく、車載レーダーに必要な送受信チャンネルを複数搭載することができます。CMOS(Complementary Metal-Oxide Semiconductor)に移行することで、レーダーMMICのコストと消費電力を削減できます。また、CMOSは過酷な車載環境で求められる温度変化にも対応可能な耐性を備えています。図3にトランシーバーMMICのブロック図の一例を示します。
レーダーシステムの性能には、レーダーMMICトランシーバーのアナログRF送受信部の性能が強く影響します。距離性能においては、主に2つのパラメータを考慮する必要があります。それは、送信部の送信出力と受信機のノイズフィギュアです。
1.2.1 送信出力
MMICの各RF出力部から送信される電力はレーダー性能のキーパラメータです。そのため、RFパワーアンプの出力を考慮する必要があります。このパラメータと上記のレーダー方程式より、受信部の受信感度(Prmin)に対する理想状態における最大検出距離は次のように計算できます。

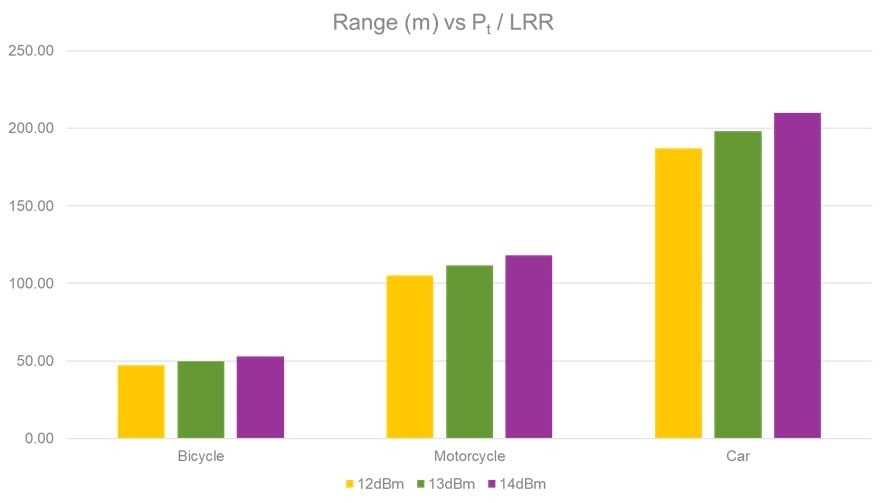
この式から、送信電力Ptを上げるとレーダーの検知距離が伸びることがわかります。例えば、ロングレンジレーダー(LRR)の出力を1dB上げると、図4に示すように、自転車の検知距離は2.8m、バイクは6m、自家用車は11m伸びます。このことは、高速道路を高速走行中、予期せぬ交通障害物に遭遇した時、適切に停止できるか、衝突するかの違いを意味します。
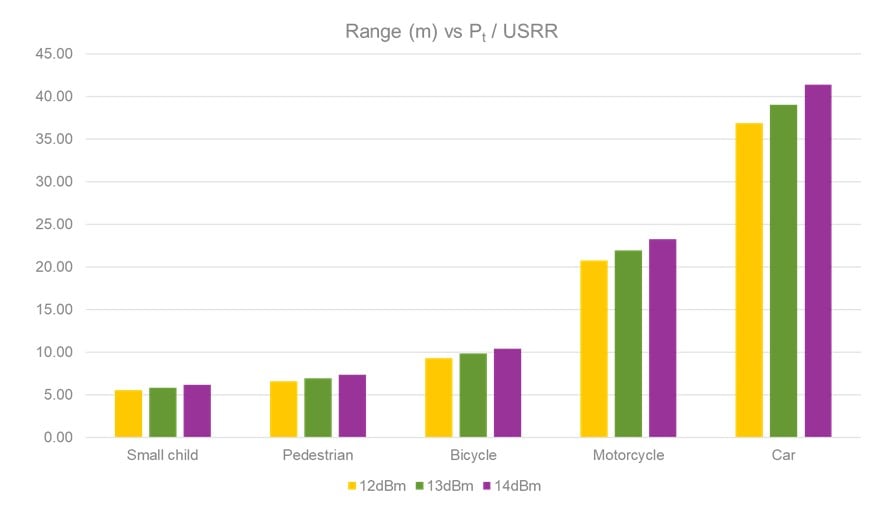
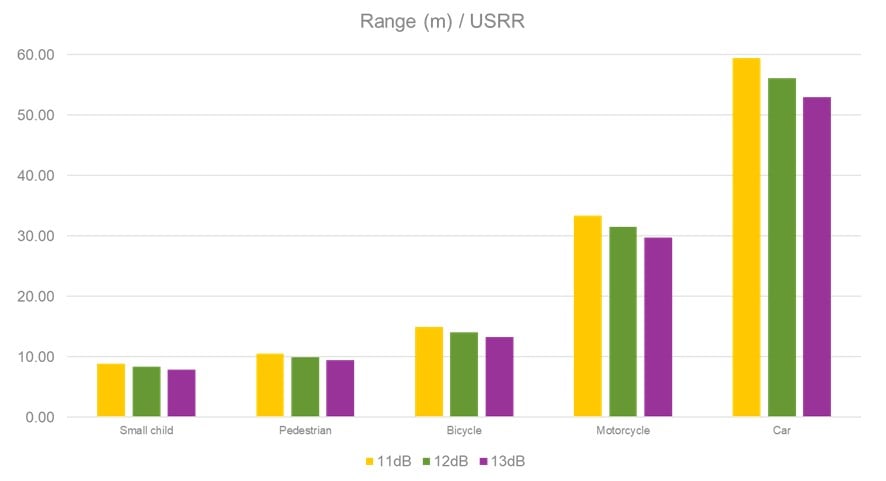
しかし、出力を上げることで得られるメリットは、短距離の用途にも見られます。USRR(Ultra Short-Range Radar)の場合、図5に示すように、送信電力を1dB上げると、検知距離を35〜50cm伸ばすことができ、小さな子供や歩行者、自転車を検出しやすくなります。これは、混雑した市街地走行において、被害を受けやすい人との事故を防ぐために特に重要なことです。
もちろん、この計算においては、実際のシナリオでみられる損失(雨、多重波伝播など)は考慮されていません。このすべてがレーダーの検出距離を理想状態よりも狭める要因となります。
例えば、レーダーモジュールは通常、車のエンブレムやバンパーの後ろに設置されます。バンパーは、その組成や塗装に応じて2〜8dbの損失をもたらします。この損失は11%から37%の検知距離短縮に相当します。可能な限り出力上げることでこの問題を相殺できます。そのため、RF送信部、特にパワーアンプの最終段の性能を最適化することが非常に重要です。
1.2.2 ノイズフィギュア
レーダー処理には検知閾値だけでなく信号対雑音比(SNR)を最小化することが必要です。レーダー受信部のSNRは、受信電力 Pr と雑音電力 N との比であり、周囲温度 T 、信号受信時間 Tmeas とすると、レーダー方程式から導き出せます。

ここで、kはボルツマン定数、Fは受信部のノイズの影響による雑音指数(dBでは、ノイズフィギュアNF)です。
受信部の検出限界をSNRminとすると、理論的に可能な最大検知距離は次のように求めることができます。

この式は、雑音指数F(言え換えると、ノイズフィギュアNF)を小さくすれば、レーダーの検出距離が伸ばせることを示しています。ここでは、システムが要求するSNRの閾値が20dBであると仮定し、上記と同じように考えてみましょう。
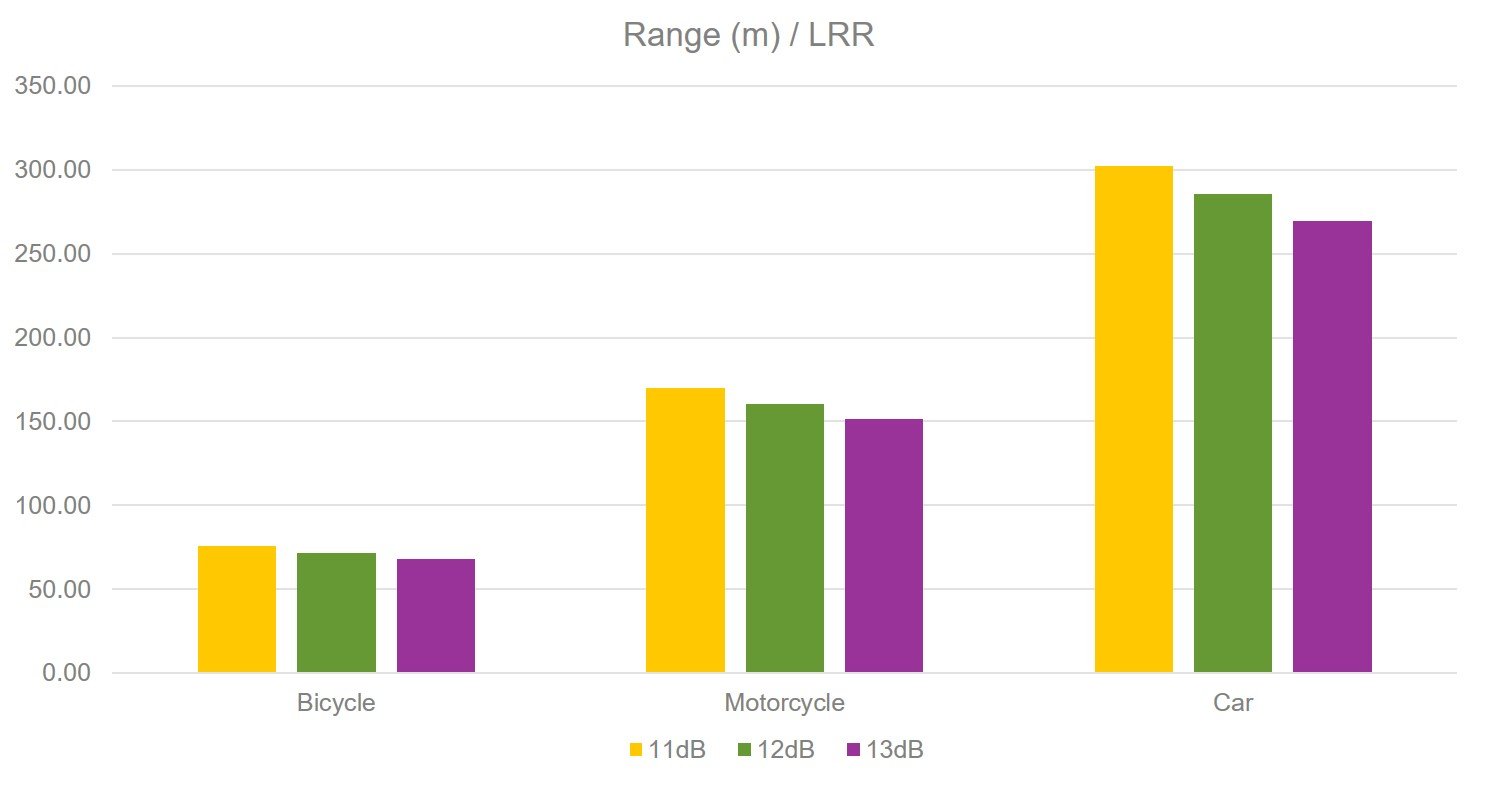
LRRの場合、図6に示すように、ノイズフィギュアを1dB下げることで、4m(自転車)、10m(バイク)、13m(自動車)と検出距離が伸びていきます。
この検出距離の伸長は短距離においても表れており、図7に示すように、ノイズフィギュアを1dB下げることで、最も被害を受けやすい通行者(子供と大人の歩行者、および自転車)の検出距離を50cmから1m伸ばすことができます。
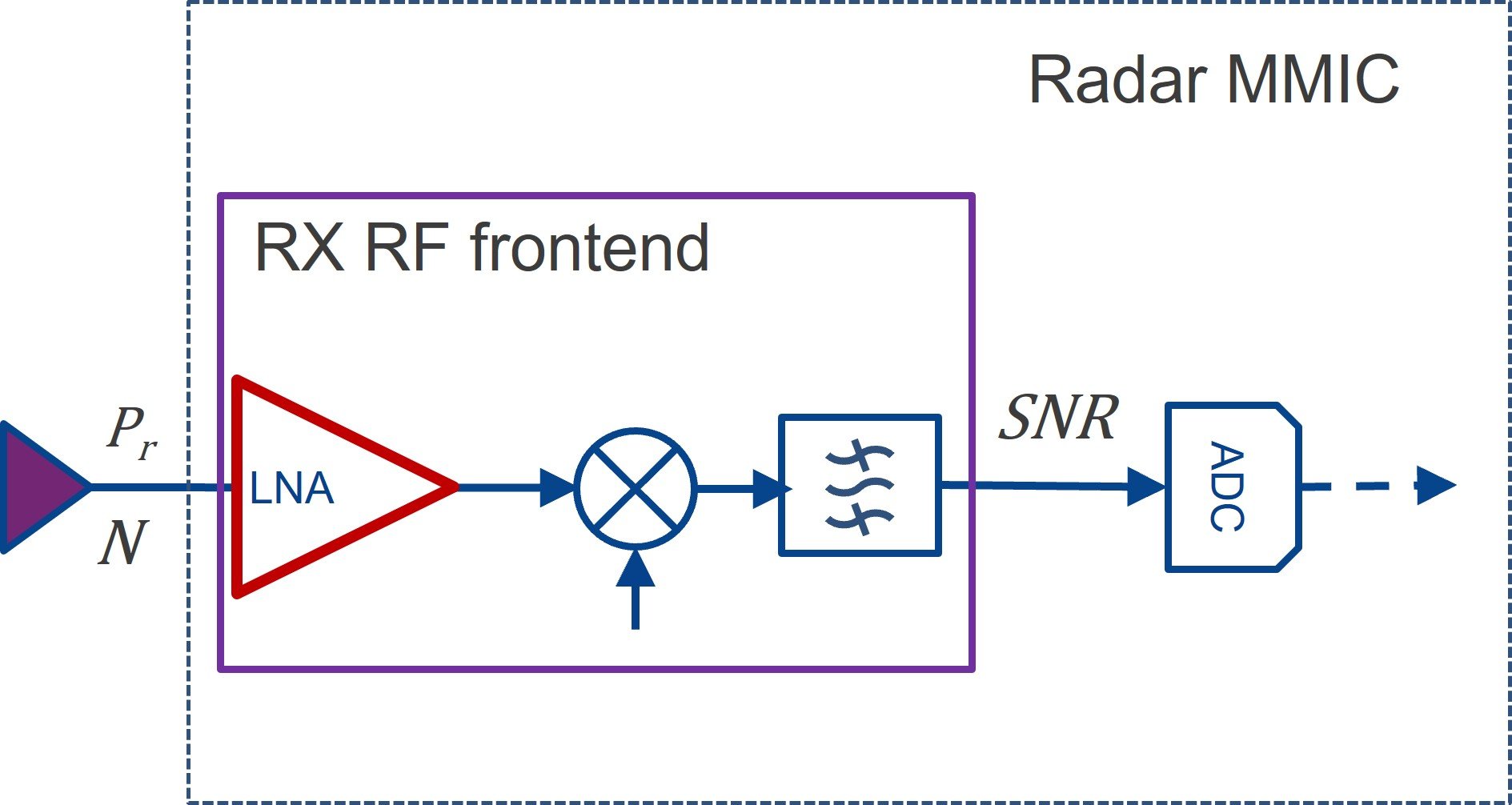
したがって、受信器のノイズフィギュアもレーダーMMICトランシーバーの設計において重要なパラメータとなります。ノイズ要因としては受信器の初段アンプが支配的(図8)であるので、レーダーMMICトランシーバーのLNAは、低ノイズフィギュアになるように注意深く設計し最適化する必要があります。
1.2.3 設計上のトレードオフ
Iこれまでの結果から考えると、レーダートランシーバーのRF性能を送信出力とノイズフィギュアという2つの重要な設計パラメータで最適化することにより、レーダーシステムの検知距離を伸ばすことができます。いずれか一方でも性能が良ければ検知距離は伸ばせます。しかし、どちらを選ぶべきでしょうか。
出力が大きいほど実際の環境で発生する損失を補うことができます。さらに、干渉に対する耐性も強化されます。一方で、MMICの消費電力が増し損失が大きくなります。この問題は送信チャンネルを多く搭載するほど顕著になります。
消費電力を抑えたい場合には、ノイズフィギュアを調整するといいでしょう。これは高効率なMMICには優れた対策です。しかし、ノイズフィギュアを低くすると、受信器のゲインを高くする必要があり、受信器の線形性に影響する可能性があります。さらに、必要な信号だけでなく不要な信号も増幅されるため、干渉に対する耐性が弱くなるかもしれません。
理想的には、使用する半導体プロセスの限界とシステム全体の設計を考慮して、両パラメータを可能な限り調整する必要があります。
1.3 まとめ
今回は、レーダーの検知距離に影響する制限事項と設計パラメータを紹介しました。ここではMMICのRF性能に着目しましたが、レーダーMMICにはこれ以外にも、A/Dコンバータ(ADC)など、検知距離に影響するパラメータがあります。また、受信電力やSNRが低くてもデジタル信号処理チェーンを最適化することで有効な信号を得ることができ、検知距離を伸ばすことができます。
次回のブログでは、レーダーシステムの精度と解像度について掘り下げてみたいと思います。