画像

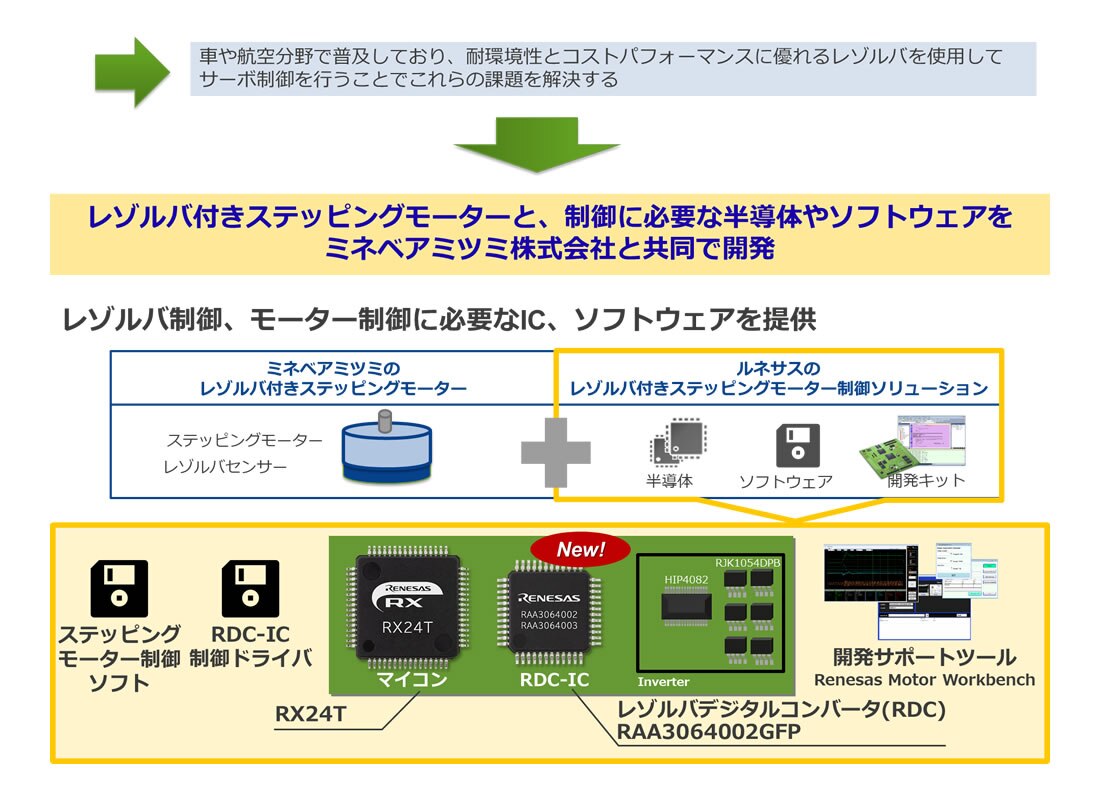
レゾルバを用いたモータ制御ソリューションは、ルネサス製のレゾルバデジタルコンバータ(RDC) ICとRXファミリのマイコンを組み合わせて実現する産業・民生向けのモータ制御システムです。対象マイコンのドライバソフトウェアを使用することで、レゾルバを用いたステッピングモータやブラシレスDCモータの制御を容易に行うことができます。レゾルバ付きモータ用のソリューションキット、サンプルコード、開発支援ツール、アプリケーションノートを用意しており、すぐにレゾルバを使ったモータ制御を始めることができます。
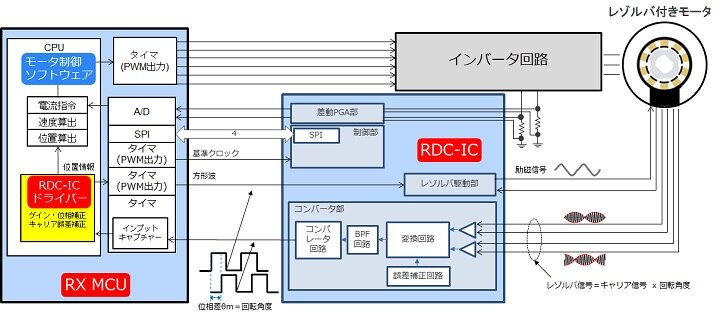
レゾルバを用いたモータ制御ソリューションは、レゾルバからの信号をRDC ICとRXマイコンで角度情報として処理し、RXマイコンでモータ制御を行います。 RXマイコンにRDC ICの専用ドライバを用意しており、レゾルバの処理をAPIから容易に行うことができます。
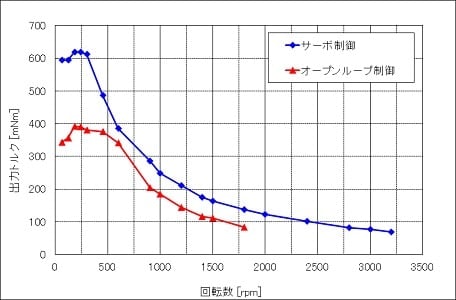
サーボ制御を行うことでモータの最大トルクまで使用することができ、高速回転まで対応可能になります。脱調マージンを考慮したモータ選定ではなく、単純な必要トルクからモータ選定できるので、オープンループ制御と比較してモータの小型化が可能です。
レゾルバを使用したサーボ制御を行うことで待機時の電流を大幅にカットすることができ、負荷に応じた必要な電流だけを消費します。また、消費電流を抑えることで、モータの発熱も抑えることができます。
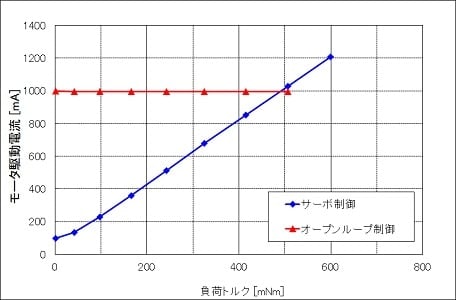
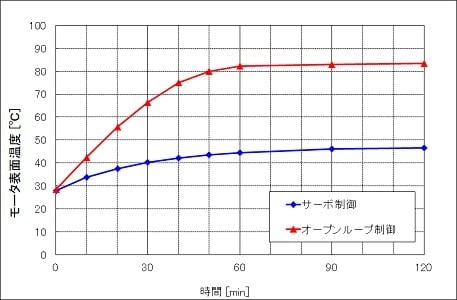
オープンループ時は負荷トルク500mNm以上になると脱調してしまうのでデータ未取得。
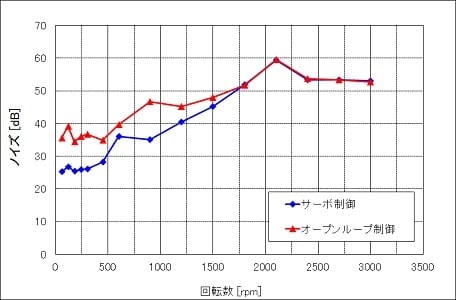
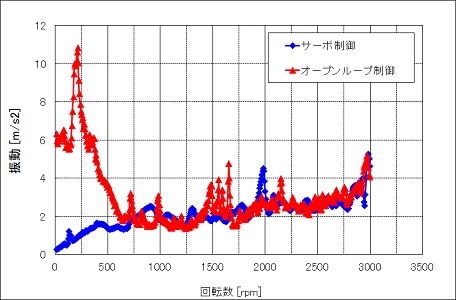
オープンループ制御と比較して、レゾルバを使ったサーボ制御を行うことで特に中速域までの騒音や振動を抑えることができます。
レゾルバ付きステッピングモータによるモータ制御ソリューションを活用し,2軸アームロボットのリファレンスガイドを作成しました。
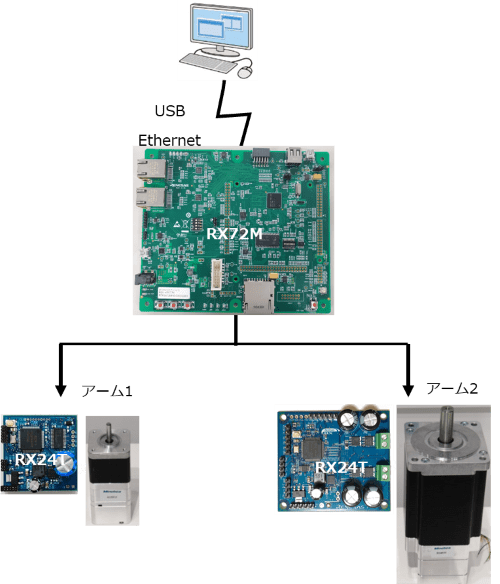
RX24T、RX72M、RAA3064002GFP/RAA3064003GFP レゾルバ付き2相ステッピングモータを使用した2軸アームロボットのリファレンスガイド Rev.1.00 (PDF | English, 日本語)
RX24T、RX72M、RAA3064002GFP/RAA3064003GFP レゾルバ付き2相ステッピングモータを使用した2軸アームロボットのリファレンスガイド Rev.1.00 - サンプルコード (ZIP | English, 日本語)
開発中
ルネサスが提供するRXファミリとレゾルバデジタルコンバータ(RDC) ICを容易に評価・検討できるソリューションキットです。
レゾルバ付きのステッピングモータを同梱しており、webからダウンロードできるソフトウェアを用いてキット購入後すぐに評価を始めることができます。
|
|
|
|
|---|---|---|
| 分類 | タイトル | 日時 |
| サンプルコード |
[Toolchains=CC-RX|V3.04.00]
ZIP
101.88 MB
英語
Compiler:
CC-RX
IDE:
CS+, e2 studio
|
|
| サンプルコード | ZIP 81.81 MB 英語 Compiler: CC-RX IDE: CS+, e2 studio | |
| サンプルコード |
RX24T、RX72M、RAA3064002GFP/RAA3064003GFP レゾルバ付き2相ステッピングモータを使用した2軸アームロボットのリファレンスガイド Rev.1.00 - サンプルコード
ZIP
22.06 MB
英語
Compiler:
CC-RL
Function:
Application Example
IDE:
e2 studio
|
|
3 items
|
||
|
|
|
|
|---|---|---|
| 分類 | タイトル | 日時 |
| アプリケーションノート | PDF 3.84 MB 英語 | |
| アプリケーションノート | PDF 3.69 MB 英語 | |
| アプリケーションノート | PDF 3.68 MB 英語 | |
| ツールニュース-リリース | PDF 243 KB 英語 | |
| アプリケーションノート | PDF 4.66 MB 英語 | |
| アプリケーションノート | PDF 646 KB 英語 | |
| アプリケーションノート | PDF 977 KB 英語 | |
7 items
|
||
