概要
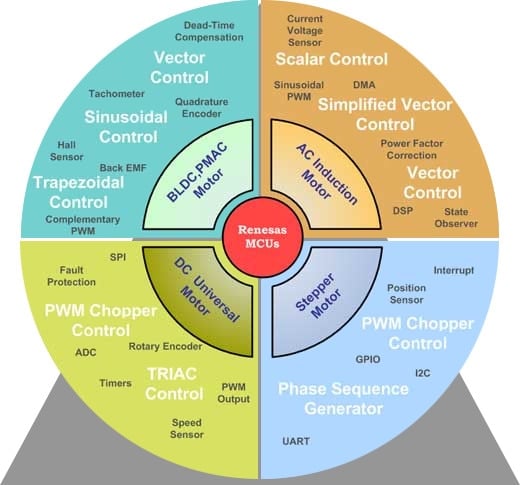
ルネサスでは、パワーエレクトロニクス、シグナルエレクトロニクスにおいて半導体が有利な点、およびミクロエレクトロニクスのマイクロプロセッサとDSPの処理機能、この2点の 主な柱を背景として、モータ制御分野は急速に展開してきました。
これらの技術進歩は、さらなる低消費電力のハードウェア、および精密な制御構造を持つ高効率な駆動制御の開発を可能にしました。直流と直流電圧の制御にとどまらず、三相交流と三相交流電圧もマイコンとソフトウェアアルゴリズムの組み合わせで制御できるようになり、電気駆動制御は高精密化してきました。
モータ制御アルゴリズムの比較
下表に最も普及しているモータ制御アルゴリズムの特徴を紹介します。
| 制御アルゴリズム (方法、方式) | モータタイプ | トルク制御性 | フィードバックセンサ | マイコン 性能条件 |
|---|---|---|---|---|
| トライアック | DCユニバーサルモータ | トルク制御無し | 不要 | 不要 |
| PWMチョッピング | DCユニバーサルモータ | トルク制御無し | 不要 | 8bit |
| V/F | ACモータ | 動的トルク制御が不十分 | 不要 | 8-16bit |
| 矩形波駆動 | BLDCモータ | 高調波損失 大、トルクリプル 大 | ホールセンサ | 8-16bit |
| 正弦波駆動 | BLDCモータ,ACモータ | 高調波損失 小、トルクリプル 小 | ホールセンサ、エンコーダ | 16-32bit |
| 簡易ベクトル | BLDCモータ,ACモータ | 高調波損失 小、トルクリプル 小 | ホールセンサ、エンコーダ | 16-32bit |
| ベクトル | BLDCモータ,ACモータ | 高調波損失 小、トルクリプル 小 | ホールセンサ、エンコーダ | 32bit |
| センサレス矩形波駆動 | BLDCモータ | 高調波損失 大、トルクリプル 大 | 不要 (逆起電力) | 16bit |
| センサレスベクトル | BLDCモータ,ACモータ | 高調波損失 小、トルクリプル 小 | 不要 | 32bit |
ユニバーサルモータ制御アルゴリズム
ユニバーサルモータの速度制御は一般的に2つの方法があります。
- 位相角制御
- PWMチョッピング制御
位相角制御
ユニバーサルモータにおいて最もシンプルな速度制御方法です。トライアックの点弧角を調整することで速度を制御します。位相角制御は非常にコスト効率の良いソリューションですが、あまり効率的でないことと、EMIに影響されやすいことが短所です。
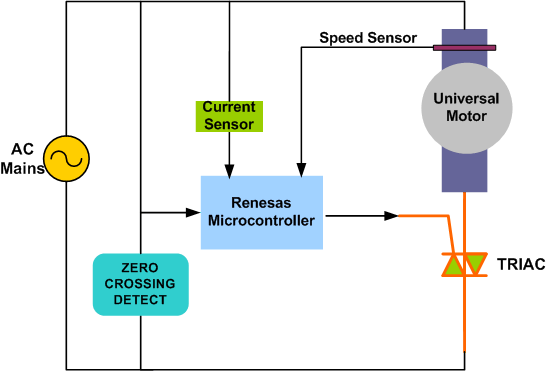
ユニバーサルモータの位相角制御
上図はトライアックの速度制御に採用する位相角制御メカニズムの例を示します。トライアックゲートパルスの位相シフトでモータの実効電圧を調整しモータの速度を制御します。ゲートパルスの点弧遅延タイミングはゼロクロス検出回路を基準に図ります。
PWMチョッピング制御
PWM制御は、ユニバーサルモータの速度を制御するためのより先進的なソリューションです。この方法ではパワーMOSFET又はIGBTデバイスで整流AC線間電圧を高周波数で切り替え、時間の関数である電圧を生成します。

ユニバーサルモータのPWMチョッピング制御
雑音除去対策として、スイッチング周波数を通常に10~20KHzに設定します。このユニバーサルモータ向け制御方法は電流制御およびEMI特性が向上し効率向上が実現できます。
ブラシレスDCモータ(BLDC)制御アルゴリズム
ブラシレスモータは自己整流型ではないため、制御がより複雑です。
BLDCモータを制御するには、ロータ位置検出とモータを整流するメカニズムが必要となります。閉ループ速度制御の場合は、モータ速度あるいは電流の測定と、モータ速度や力を制御するPWM信号も必要となります。
BLDCモータは応用要求によってエッジアライン(エッジ整列)又はセンターアライン(中央整列)PWM信号を利用します。多くの応用は可変速度動作のみが要求となり、6つの独立エッジアラインPWM信号を利用します。この方法は最も高い分解能を与えます。サーボの位置決め、発電ブレーキ又は動的逆転(dynamic reversal)を必要とする応用の場合は、補助センターアラインPWM信号をお薦めします。
BLDCモータはホールセンサでロータの絶対位置を検出するので、より多くの巻線を必要としコストが高くなります。センサレスBLDC制御ではモータのback-EMF(逆起電力)でロータ位置を推定するのでホールセンサは要りません。低コストを求めるファン、ポンプ等の可変速度応用にはセンサレス制御が不可欠です。冷蔵庫やエアコンのコンプレッサにBLDCモータを採用する場合もセンサレス制御が必要となります。
デッドタイム挿入と補償
様々な制御アルゴリズムはBLDCモータ制御に使用されています。一般的に、リニア電圧調整器として動作するパワートランジスタを使ってモータ電圧を制御します。但し、この方法は高出力モータの駆動に実用的でないため、高出力モータの場合はPWM制御かつ起動・制御機能が提供できるマイコンが必要です。
使用する制御アルゴリズムには以下3つの必要条件があります。
- モータ速度を制御するためのPWM電圧
- モータを整流するメカニズム
- Back-EMF又はホールセンサでロータ位置を推定する方法
PWM方式で可変電圧をモータ巻線に印加します。実行電圧はPWMのデューティ比に比例します。正しく整流すればBLDCモータのトルク・速度特性がDCモータと一致します。可変電圧はモータ速度や有効トルクの制御に使用できます。
パワートランジスタの整流によって適切な固定子巻線に電圧を加え、ロータ位置に応じて最適なトルクを生成します。BLDCモータでは、マイコンでロータの位置を検出し適切なタイミングで整流する必要があります。
BLDCモータの矩形波整流
ブラシレスDCモータで一番シンプルな制御方法の一つは矩形波整流と呼ばれる方法です。
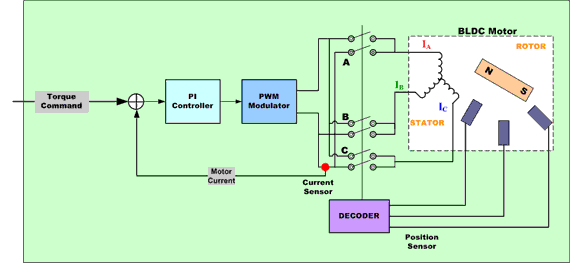
図1:BLDCモータ用矩形波コントローラを簡略化したブロック図
上記の図では、電流は一組ずつモータ端子に流れるようにします。3つ目の端子は常に電源から切断します。
通常はモータに組み込んだ3つのホール素子がデジタル出力で60°以内で測定し、ロータ位置情報をモータコントローラに転送します。どの時点においても2つの巻線に量の等しい電流が流れ3つ目が電流ゼロのため、この方法では6つの方向の中から1つの方向の電流の空間ベクトルしか提供できません。モータ回転時、電流の空間ベクトルが常に直交方向の30°以内になるように、モータ端子へ流す電流は回転度60°ごとに電気的に切り替えて整流しています。
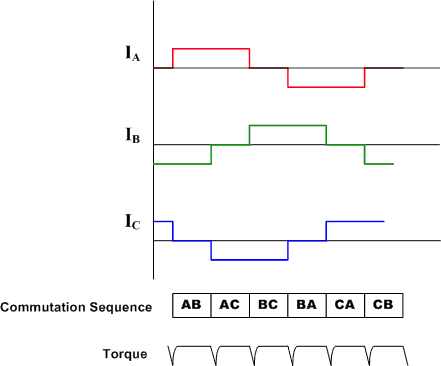
図2:矩形波駆動制御:整流時の駆動波形とトルク
各巻線の電流波形はゼロ→正電流→ゼロ→負電流の階段形になっています。
モータの回転につれて電流の空間ベクトルが6つのはっきりとした方向を通るので、スムーズな回転に近づきます。
エアコン、冷蔵庫等のモータアプリケーションではホールセンサの使用が実用的ではありませんが、接続されていない巻線の逆起電力が検出できるback-EMFセンサを使用すれば同様な結果を実現できます。
制御回路が簡易なため矩形波‐電流駆動システムはポピュラーですが、整流時のトルクリップルの欠点があります。
矩形波駆動(120度通電制御)の解説
BLDCモータの正弦波整流
矩形波整流方法はスムーズで精密なBLDCモータ制御に不十分です(特に低速動作では)。正弦波整流はこの問題を解決します。正弦波back-EMF三相ブラシレスモータのトルクは以下の方程式によって定義されています。
軸トルク = Kt [IRSin(φ) + ISSin(φ+120) + ITSin(φ+240)]
φは軸の電気角
Ktはモータのトルク係数
IR, IS and IT は相電流
相電流は正弦波の場合、IR = I0Sinφ; IS = I0Sin (+120φ); IT =I0Sin (+240φ)
なので、
軸トルク = 1.5I0*Kt (軸角に依存しない定数)
になります。
正弦波整流BLDCモータコントローラはモータ回転時、なるべく3つのモータ巻線を3つのスムーズで正弦波的に変動する電流で駆動します。この3つの電流の相対位相は、常にロータに対して直交方向にあり、定電流量のスムーズに回転する電流の空間ベクトルを得るために適切に選ばれます。これによって矩形整流方法で問題となったトルクリップルや整流スパイクが解消されます。
モータ回転時にモータ電流をスムーズに正弦波変調するにはロータの位置を正確に測定する必要があります。ホール素子でのロータ位置測定が粗いのでこの場合には不十分です。このため、エンコーダあるいは類似なものによる角度のフィードバックが必要となります。
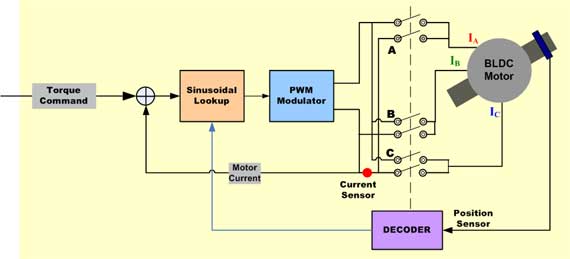
図3:BLDCモータ用正弦波コントローラの簡略化したブロック図
巻線の電流の組み合わせで定電流量のスムーズに回転する電流の空間ベクトルを生成すること、そして固定子巻線が120°ごとに配向されていることの2つの条件から、各巻線の電流は位相シフト120°の正弦波に決めます。エンコーダからの位置情報を使用して2つの正弦波を合成します。片方の正弦波は位相シフト120°になります。続いてこの2つの信号は、正弦波の振幅が目標トルクに比例させるためにトルク命令に乗算されます。2つの正弦波電流命令信号の適切な位相シフトの結果として、直交方向で回転する固定子電流の空間ベクトルが生成されます。
正弦波電流命令信号はモータ巻線の電流を調整する2つのP-Iコントローラに入力します。3つ目のモータ巻線の電流はこの2つの負の合計になるので単独で制御できません。各P-Iコントローラの出力はPWM変調器を経て出力ブリッジおよび2つのモータ端子に供給します。 3つ目のモータ端子に印加する電圧は、120°離れた3つの正弦波電圧に見合って、1、2つ目の巻線に入力された信号の負の合計によって得られます。
実出力電流波形は正確に正弦波電流命令信号が追跡できる範囲内で、結果として望んだとおりの直交方向に配向された定電流量のスムーズに回転する電流の空間ベクトルが得られます。
正弦波整流は矩形波整流で普通に実現できない程度のスムーズな制御が実現できます。但し、低速モータにおいてとても効率的であることの一方で、高速動作では効率が低下してしまいます。なぜかというと、速度が上がると電流ループコントローラは周波数の増加して行く正弦波信号を追跡しなければなりません。同時に振幅や周波数の増加して行くモータのback-EMFも乗り越えなければならないので、結果的に効率が下がります。
P-Iコントローラの利得と周波数応答に限界があるため、電流制御ループの時変摂動がモータ電流の位相のずれや利得誤差を発生します。高速であればあるほど、ずれや誤差は酷くなります。位相のずれや利得誤差は電流の空間ベクトルのロータに対しての方向をかき乱し直行方向からずらしてしまいます。
上記が起こると、一定の電流が提供できるトルクが減ってしまうので、トルクを維持するために電流を増やす必要があり、結果として効率が低下します。
速度が上がるとともに効率低下が大きくなります。やがてモータ電流の位相シフトは90°を超えトルクはゼロに落ちます。これ以上の速度は負トルクという結果となるので、正弦波整流ではモータ電流の位相シフトは90°を超える速度が実現できません。
正弦波駆動(180度通電制御)の解説
実機でも確認できます!
誰でも簡単にブラシレスDCモータの制御に取り組むことができるスタータキット
永久磁石同期モータのセンサレスベクトル制御 (アルゴリズム編) Rev.1.02 (PDF | English, 日本語)
ACモータ制御アルゴリズム
スカラー制御
スカラー制御(V/Hz制御とも呼ばれる)はインダクションモータの速度を制御する簡易技術です。
主にインダクションモータの定常状態モデルから派生する技術なので、一時的な性能は可能ではありません。また、システムには電流ループがないため、三相電源の電流量と周波数を調整することによりモータを制御します。
ベクトル制御と磁界方向制御
電気モータのトルクは固定子とロータの界磁に比例して変化します。界磁が直交したときにトルクはピークになります。スカラー系制御では界磁の間の角度が大きく変動します。
ベクトル制御は、ACモータに固定子とロータの界磁の直交関係を作ろうとします。ベクトル制御は、トルクを生成する電流を、磁束を生成する電流から独立制御することでDC機械と同等の応答性を追求します。
ACインダクションモータのベクトル制御は他励DCモータの制御と類似しています。DCモータでは界磁電流IFが生成する界磁フラックスΦ Fは電機子電流IAが生成する電機子フラックスΦAと直交します。2つの界磁は分離した状態でお互いに定常です。従ってトルクを制御するために電機子電流を調整しても界磁フラックスに影響しないので高速過渡応答が実現できます。
三相ACモータの磁界方向制御(Field Oriented Control = FOC)はDCモータの動作を真似します。全ての被制御変数はACからDCへ数学的に変数することで、トルクとフラックスを別々に制御できるようになります。
磁界方向制御方法は2つあります。
- 直接磁界方向制御:ロータ磁束角度を磁束推定、または測定から直接計算します。
- 間接磁界方向制御:ロータ磁束角度を有効速度とスリップ計算から間接計算します。
ベクトル制御では、ロータ磁束の位置を検出する必要があります。ACインダクションモータの動態モデルを使用すれば、先進アルゴリズムで端子の電流値と電圧値からロータ磁束の位置が計算できます。但し、実施の観点から計算リソースが重要になります。
他には、フィードフォワード技術、モデル推定器並びに適応制御技術を採用するという方法があり、応答性と安定性が強化できます。
ACモータのベクトル制御:詳細ACモータのベクトル制御:詳細
ベクトル制御アルゴリズムの核になっているのは数学的変換のクラーク変換(Clarke Transformation)、パーク変換(Park Transformation)およびそれらの逆変換です。クラーク変換とパーク変換は制御可能の固定子電流をロータの領域へ持ってきます。するとモータ制御システムは、動的に変化する負荷に対してトルクを最大化させるための固定子電圧が判定できます。
クラーク変換:クラーク数学的変換は三座標系を二座標系へ変換します。
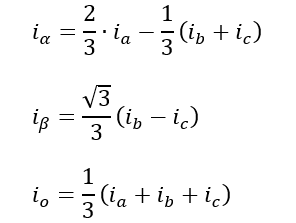
Iα、Iβは直交標準面の成分です。 Ioは単一面の成分で、重要ではありません。
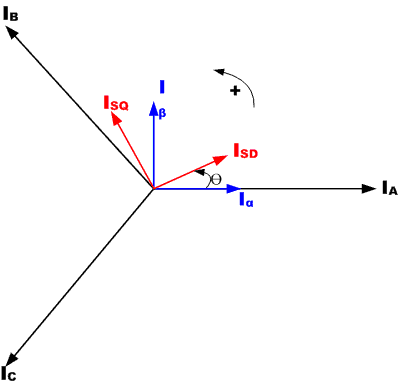
図4:三相固定子電流の関係性:基準座標系が回転
パーク変換:パーク数学的変換は二相固定システムベクトルを回転システムベクトルへ変換します。
クラーク変換で計算した二相α, β座標表現をベクトル回転ブロックに入力し、 ロータ磁束に付着したd, q座標を追跡して角度θを回転します。上記の方程式によって角度θを回転します。
ACモータの磁界方向ベクトル制御の基本図式:
図2にACモータの磁界方向ベクトル制御の基本図式を示します。
クラーク変換は三相電流IA、IB、ICから二相直交固定子座標の電流Iα、 Iβを計算します。固定座標系の電流Iα、Iβはパーク変換で d, q 座標の電流Isd、 Isqへ変換します。電流 Isd、 Isqとモータ磁束モデルで計算する瞬時磁束角度θから、ACインダクションモータの電気トルクを計算します。
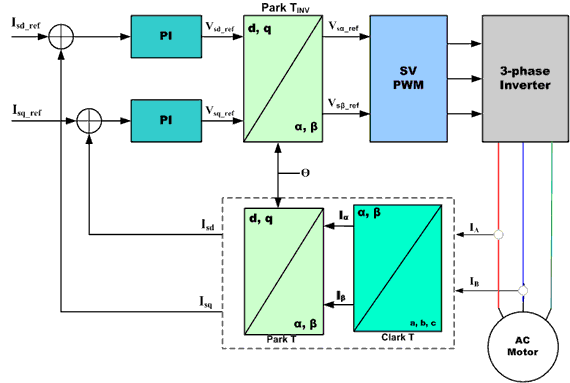
図2:ACモータの磁界方向ベクトル制御の基本図式
計算結果はPIコントローラによって基準と比較して更新されます。
表1:モータのスカラー制御とベクトル制御の比較:
| 制御パラメータ | V/Hz制御 | ベクトル制御 | センサレスベクトル制御 |
|---|---|---|---|
| 速度調整 | 1% | 0.001% | 0.05% |
| トルク調整 | 良くない | +/- 2% | +/- 5% |
| モータモデル | 不要 | 要 | 正確なモデル要 |
| マイコン性能 | 低 | 高 | 高 + DSP |
ベクトル系モータ制御の固有メリットは、 AC、永久磁石AC又はBLDCモータに適切な数学モデルを入れ替えることだけで、同じ図式で各種モータタイプの制御が実現できることです。
BLDCモータのベクトル制御
BLDCモータもまた磁界方向ベクトル制御にとても適しています。磁界方向制御方法を採用するBLDCモータは95%までのさらに高効率が実現でき、モータの最高速度範囲でも効率的に動作が可能です。
ステッピングモータ制御アルゴリズム
ステッピングモータ制御は通常、 双方向駆動電流を採用し巻線を順に切り替えることでモータをステッピング(ステップ角度ごとに回転)させます。駆動順は3つあります。
- 一相オン・フルステップ駆動:この制御モードでは巻線がAB、CD、BA、DCの順に励磁します(BAとは巻線ABを逆方向に励磁することを意味します)。 この順は「一相オン」フルステップ又は波駆動モードと呼ばれます。任意の時点で一相のみが励磁されています。
- 二相オン・フルステップ駆動:このモードでは二相を同時に励磁するので、ロータは常に2つの極位置の間に整列します。 「二相オン」フルステップと呼ばれます。このモードはバイポーラモータの標準駆動順であり、最大のトルクを産出します。
- 半ステップモード:この方法は「一相オン」モードと「二相オン」モードの組み合わせで、
一相励磁⇒二相励磁⇒一相励磁⇒…となります。 モータは半ステップごとに回転します。この順は半ステップモードと呼ばれます。モータの励磁に対しての有効ステップ角度は半分になりますが、より小さいトルクを産出します。
上記3モードをどれも逆方向の回転(逆時計回り)に使えます。駆動順だけを逆にします。
ステッピングモータは通常、ステップ角度を少数に抑えるために複数の極を設置しますが、巻線の数と駆動順は変わりません。