
Image
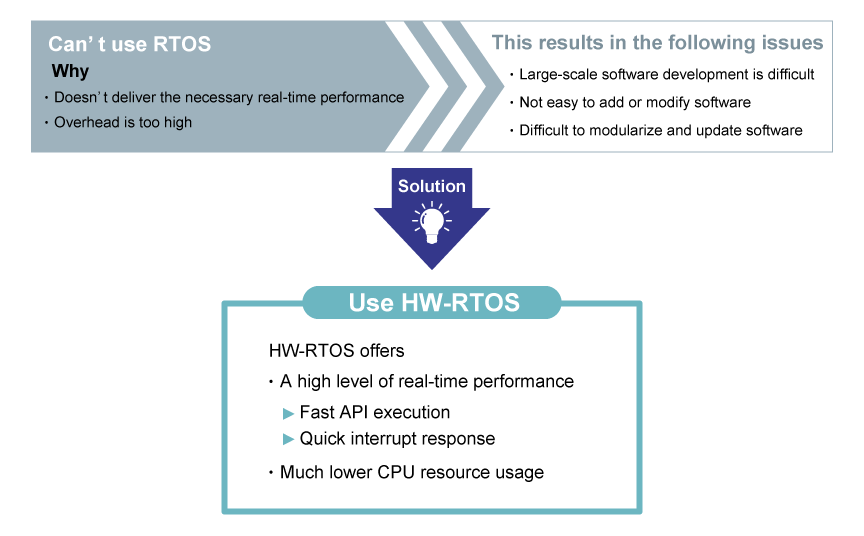
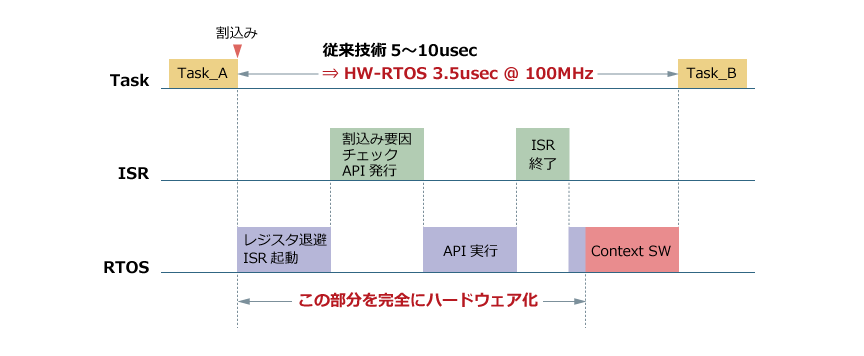
HW-RTOS is a hardware real-time OS. HW-RTOS realizes excellent real-time performance with low overhead compared to conventional software RTOS implementations. It supports semaphore, event flags, and about 30 other standard APIs, and enables fast, consistent execution time and interrupt response. This enables a worst-case execution time to be specified, which facilitates the design of real-time systems.
Learn more about HW-RTOS from these tutorials:
Learn about basics of conventional software-based real-time OS:
|
|
|
|
|---|---|---|
| Type | Title | Date |
| Brochure | PDF 498 KB 日本語 | |
| Brochure | PDF 998 KB 日本語 | |
2 items
|
||
| Product | Description |
|---|---|
| RZ/N1D | Cortex®-A7(Dual) + Cortex®-M3 4p GbE Switch +1 MAC EtherCAT Slave Controller Sercos |
| RZ/N1S | Cortex®-A7 + Cortex®-M3 4p GbE Switch +1 MAC EtherCAT Slave Controller Sercos |
| RZ/N1L | Cortex®-M3 4p GbE Switch +1 MAC EtherCAT Slave Controller Sercos |
| RZ/T1 | Cortex®-R4 Processor with FPU + Cortex®-M3 2p Ether Switch + 1 MAC EtherCAT Slave Controller* (*Option) |
| R-IN32M3-EC | Cortex®-M3 2p Ether Switch On chip PHY EtherCAT Slave Controller |
| R-IN32M3-CL | Cortex®-M3 2p GbE Switch CC-Link IE Field Controller |
| R-IN32M3-CL2 | Cortex®-M4 Processor with FPU 2p GbE Switch On chip GbE PHY CC-Link IE Field Controller |