

概要
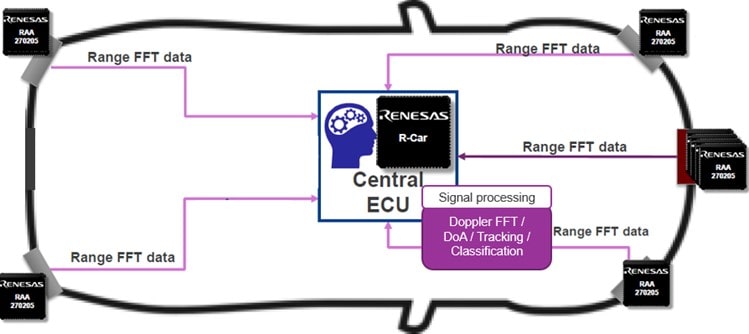
自動運転の実現のためには、自動車の前面や側面等に配置された複数の車載レーダーを駆使して全方位のレーダーデータを処理する必要があります。ルネサスでは、複数のレーダーを処理するシステム構成として、高性能SoCであるR-Carの性能を活かしてレーダーデータを中央で一元処理するセントラル構造アーキテクチャを推進しています。セントラル化を行うことで、R-Carのディープラーニング性能を活かした高精度な信号処理を行うことができます。その結果、自動運転の実現に不可欠なセンシング性能の向上につながり、高度な自動運転レベルの実現に貢献します。
背景
自動運転システムにおいて、車両周辺の物体までの距離を計測するために車載向けレーダーが使用されていますが、近年ますますレーダーの検出精度に関する要求が高まっています。対象物がそこにあるというオブジェクトレベルの検出だけでは、交通事故が起きやすい交差点などでの自動運転制御を行うためには不十分です。対象物が人であるか自転車やバイクなどであるかを識別すると同時に、車両の向きや形状をも高精度で識別することが必要であり、そのためにはレーダーが対象物までの距離や角度を高精度で識別可能であることが求められます。
下記のルネサスブログにおいて、レーダーの必要性や基本原理について述べていますのでこちらもご覧ください。
- RADAR blog
- Blog 1: レーダーはなぜ必要か?
- Blog 2: FMCWレーダーの基本
- Blog 3: レーダーの距離測定
- Blog 4: レーダーの解像度
高精度な識別を行うためには、高機能のプロセッサをレーダーモジュールに配置して処理を行う必要がありますが、自動車に搭載される車載レーダーの数は増加しており、個々のレーダーモジュールに高機能プロセッサを配置するのは高コストとなってしまいます。
ルネサスは、より高精度なレーダーを低コストで実現するためのアプローチとして、レーダー信号処理の大部分を中央のSoCで処理するセントラル構造アーキテクチャへの移行を推進しています。これにより、レーダーモジュールのデータに対して高精度な識別を行うことができると同時に、全体的なコスト削減を図ることができます。
具体例
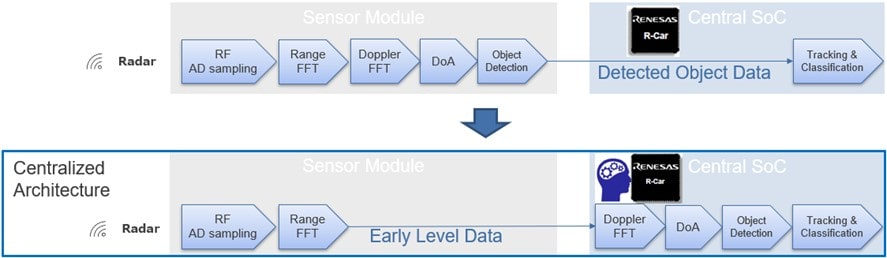
一般的なレーダーモジュールでは、センサーエッジ側でアナログデータの収集とADサンプリング、および信号処理や対象物検出まで大半の処理を行った上で、対象物データを出力します。センサーエッジ側で信号処理を行っていた場合は、中央で参照するデータはある程度加工が為された対象物の最終的な状態のデータではあるため、更なる解析の余地は少ない状態です。
セントラル構成アーキテクチャでは、センサーエッジで行う処理を減らし、大部分のレーダー信号処理をセントラルSoCに移動する中央集約化を行います。
その結果、Earlyレベルの状態のデータが中央に集まります。これにより、レーダー信号処理を進めるにつれて情報が欠落していく前のデータに対して、中央に配置した高性能なセントラルSoCで処理を行うことができます。同時に、センサーエッジ側に高性能なプロセッサを配置したりDSP機能などを持たせたりする必要はなくなり、コストの削減につながります。
信号処理を中央に集約し、Earlyレベルのデータに対してR-Carを用いて信号処理を行う構成とすることで、AIの活用を図ることができます。R-Carのディープラーニング性能をフルに活かしたデータ解析を行うことができるため、より高精度なレーダー情報を生成することができます。
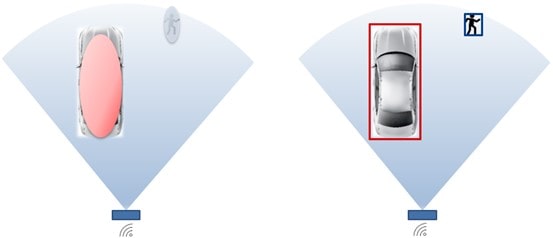
例えば下図のようにレーダーの照射範囲に付近の自動車と遠方の人間が存在する場合、自動車についてはレーダーの反射波が強く自動車をオブジェクトとして認識することは容易ですが、遠方の人間に対しては反射波が弱く、後処理においてピーク検出を行う際にオブジェクトとして認識できない可能性があります。そこで、ピーク検出処理に対しAIを導入し、多数の学習データを用いて対象物の反射データかノイズかのデータ解析を行うことで、右図のように遠方に存在するオブジェクトの存在を正確に認識することができるようになります。
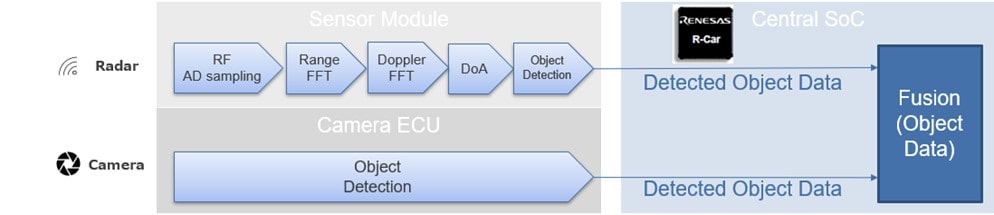
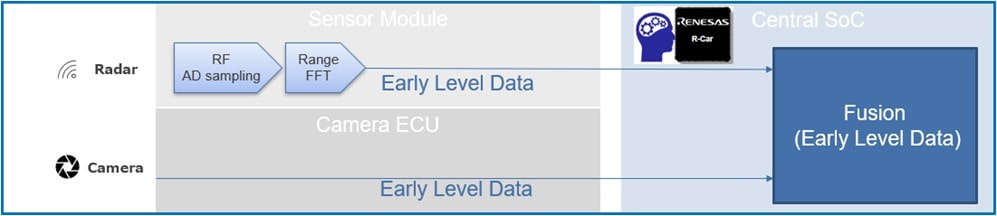
また、セントラル構成アーキテクチャの推進により、カメラから得られるデータとレーダーから得られるデータを組み合わせてより正確な情報を生成するセンサーフュージョンの精度向上を図ります。
従来の構成の場合は、カメラとレーダーそれぞれのセンサモジュールで得られるオブジェクトレベルでのデータに対して融合を行いますが、カメラとレーダーがそれぞれオブジェクトに対する部分的な情報しか持たない場合、いずれのセンサーにおいても個々の判定結果としてはオブジェクトとして検出されない可能性があります。
セントラル構成アーキテクチャの推進により、レーダーから得られるデータがEarlyレベルのデータであれば、それぞれのセンサモジュールからの対象物の認識判断を行うための情報がそのまま利用可能であるため、オブジェクトと判断するための部分的な情報であったとしてもそれを融合し、融合されたデータに対して多数の学習モデルに基づいた分析を行うことで、オブジェクト検出を行うことができます。
まとめ
これからますます自動運転の実現のためにレーダーが果たす役割は大きくなり、より高精度な処理を低コストで行う要求は高まるばかりです。ルネサスはセントラル構造アーキテクチャの推進によって、AIの導入などを可能にし、課題を解決していきます。さらにはカメラデータとのセンサーフュージョンの技術の導入も進めており、センシング処理の更なる向上を目指しています。ルネサスは今後も自動運転の可能性をあらゆる方面で追求していきます。
下記のページでは、ADAS&ADの各アプリケーションに向けたレーダートータルソリューションの提案を行っておりますので、こちらもご覧ください。
- Winning Combinations