
概要
Softwareにより車の価値を定義するSoftware defined vehicleにおいては新しいアプリケーションをさまざまな車種へ搭載する事が求められます。このため、デバイスを意識することなくアプリケーションを開発することができるソリューションの開発に取り組んでいます。
背景
Softwareにより車の価値を定義するSoftware defined vehicleにおいては新しいアプリケーションをさまざまな車種へ搭載する事が求められます。これを実現するためには、開発者はECUのハードウェア構成を意識せず容易にアプリケーションを開発し、かつハードウェアの持つ性能を最大限に活用するソリューションを必要とします。
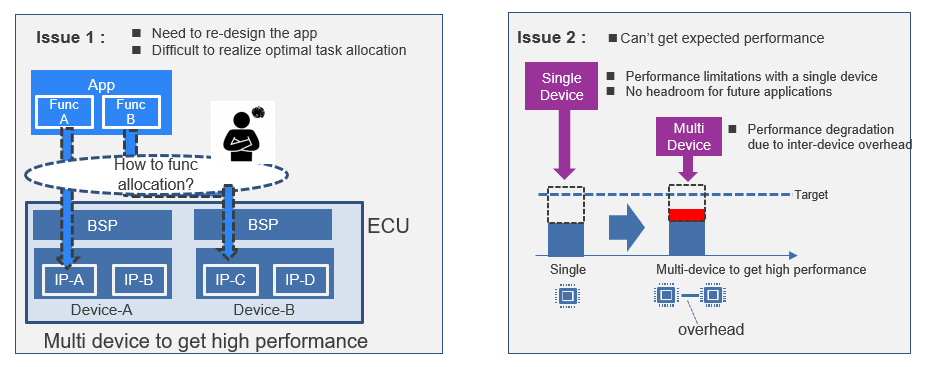
しかしながら、現状は課題が存在します(図1) 。高性能を必要とするハイエンド向け車種の開発時に、マルチデバイスの構成を取るケースがあります。例えば、AIアクセラレータの性能やCPUの性能を向上するためにデバイスを追加するケースです。その際、アプリケーション開発者は、アプリケーション内の機能を実行するハードウェア(実行デバイスや実行HW IP)の検討や実装がマルチデバイス向けに必要になります。(Issue 1) また、デバイス間のデータ通信オーバーヘッドにより期待した性能を得ることが出来ない場合もあります。(Issue 2)
これらの課題により新しいアプリケーションを車載に搭載するための開発期間が長くなり、Software defined vehicle実現に向けて妨げになります。
具体例
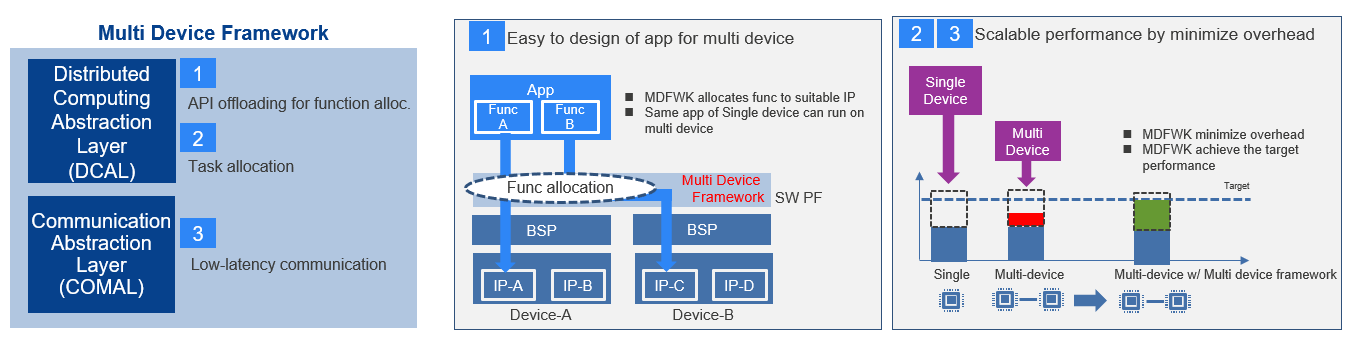
ルネサスでは上記課題を解決するために「マルチデバイス用分散処理Software(Multi Device Framework)」の開発を進めています(図2)。 アプリケーションの機能を複数のデバイス(SoCやマイコン) 内部のCPUやIPへ分散し最適に配置することにより、ハードウェアが持つ性能を最大限に引き出すことが出来るSoftwareです。開発者はECUハードウェアの構成を意識せずに新たなアプリケーションを次々と開発することが可能です。ハードウェア構成が変更になった場合でも追加デバイス用にアプリケーションを開発し直すことなく、システム性能を拡張できます。ルネサスはADAS、GW向けSoCのR-Carシリーズおよび車載用MCU RH850の幅広いポートフォリオを保有しており、これらのデバイスを組み合わせたアプリケーション開発を可能にします。
このようなコンセプトで上述の課題を解決するよう開発に取り組んでいます。
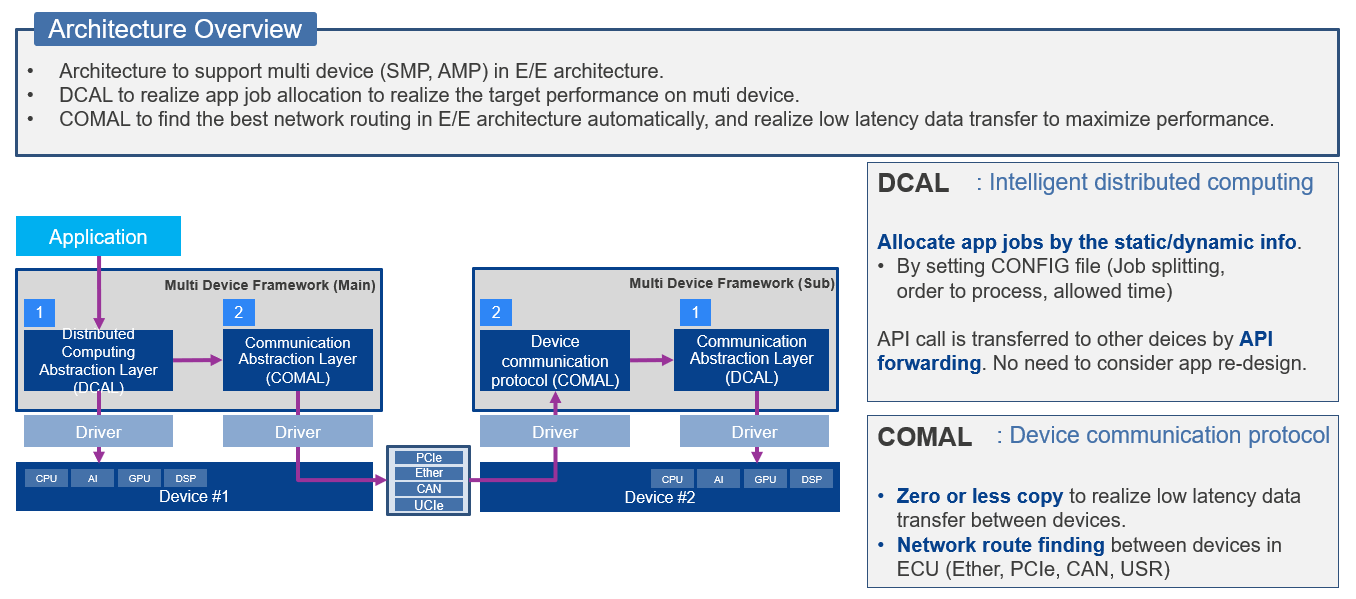
マルチデバイス用分散処理Softwareのアーキテクチャ (図3) は、アプリケーションのジョブを適切なデバイスとHW IPに分散処理するDCAL(Distributed computing abstraction layer)とデバイス間のデータ転送オーバーヘッドを最小化するCOMAL(Communication abstraction layer) で構成されています。DCALでは処理の順序、許容される時間などの情報を元にHW IPの分散処理を効率的に行います。また、アプリケーションでコールされたAPIを別のデバイスで実行するための技術も搭載しています。一方でCOMALは、CPUによるデータコピーを排除しPCIeなどのHW IPを利用した高速なデータ転送によりデバイス間の通信オーバーヘッドを削減します。このようなコア技術によりアプリケーション開発者が直面するマルチデバイスの課題を解決します。現在はこれらのコア技術検討および試作を進めており、今後はルネサス製デバイス(ADAS, GW向けSoCや制御系MCU)向けの製品化対応を順次行う予定です。
まとめ
本記事ではSoftware defined vehicle実現に向けての現状課題と課題解決のためのルネサスの取り組みを紹介しました。Softwareによる車の価値創出に向けてルネサスはデバイスに加えSoftwareや開発環境の提供にも取り組んでいきます。