
ROS(Robot Operating System)はロボット開発に必要となる様々なソフトウェアライブラリやツールを提供するオープンなフレームワークです。2007年のリリース以降多くのロボットに採用実績があります。高いリアルタイム性の実現やマイクロコントローラへの実装などの新たなニーズをカバーする次世代版であるROS 2への移行も進んでいます。ルネサスはROS 2をマイクロコントローラで使用するための実証デモを行っておりその成果を公開しております。さらにマイクロコントローラ向けに親和性のより高いオープンソースプロジェクト micro-ROSフレームワークをRAファミリ製品でサポートしており、ロボット向け製品開発を容易化するソリューションを提供しています
ROS 2デモ
実証デモ1
RX63NによるDDS通信を行うデモです。ROSの開発者会議(ROSCon 2017)で発表したものです。

実証デモ2
RX65NによるDDS-XRCE通信を行うデモです。ROSCon JP 2018、ROSCon 2018で展示したもので、2018年10月29日にニュースリリースいたしました。
画像
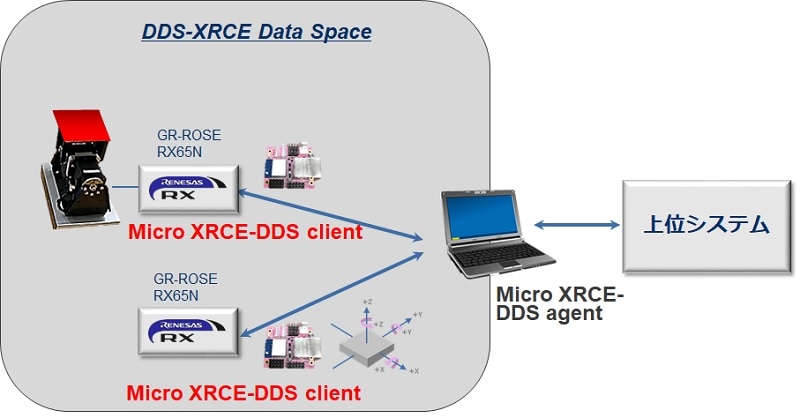
Micro XRCE-DDSはeProsima社製のDDS-XRCEミドルウェア
