
0. はじめに
フォトカプラや光MOS FETを使うとき、電気的な設計だけでなく、当然それらが過熱で壊れないような放熱も考えなければなりません。
しかし、フォトカプラや光MOS FETのデータ・シートをいくら探してみても、放熱の設計に使う「最大ジャンクション温度」や「ジャンクション-ケース間熱抵抗」などはどこにも書いてありません。
いったいどうすれば過熱しないように使うことができるのでしょうか?
ここでは、そういったフォトカプラや光MOS FETの放熱の考え方についてご紹介します。
1. パワーデバイスとシグナルデバイス
半導体デバイスの世界には、その区分の1つとして、「パワーデバイスとシグナルデバイス」という考え方があります。
この考え方は主に許容内部損失によって区分するもので、かなり主観的ですが、比較的大きな内部損失が許されるものを「パワー(電力)デバイス」と呼び、そうでないものを「シグナル(小信号)デバイス」と呼んでいます。
これらは必然的に、「パワー(電力)デバイス」はヒートシンク(放熱器)を付けて使うように作られ、「シグナル(小信号)デバイス」は特にヒートシンク(放熱器)を付けずに、デバイス表面および配線から空気の対流で放熱するように作られるのが一般的です。
なぜこのような話を最初にするかと言いますと、ヒートシンク(放熱器)を使うかどうかによって、放熱計算のしかたとそこに使う数値とが異なるためです。
次の図をご覧ください。
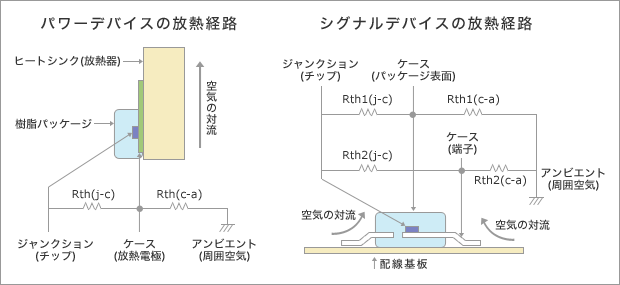
図1 一般的な半導体の放熱
この図で見るように、左の「パワーデバイス」では、チップの表面直下にあるジャンクションで発生する熱は、チップの裏側に伝わり、そこから「ステム」とか「リードフレーム」とか呼ばれる、チップが直接接着されている金属板(放熱電極)まで伝わります。
このジャンクションから「ステム(放熱電極)」までの熱伝導抵抗が「ジャンクション-ケース間熱抵抗:Rth(j-c)」です。
パワーデバイスでは、この放熱電極がパッケージの外に露出しているので、絶縁板を通して(稀に通さずに)ヒートシンク(放熱器)に取り付けられます。熱伝導を良くするために、これらの間には熱抵抗の低いシリコーングリスを塗ったりします。
最後に、ヒートシンク(放熱器)からは主に空気の対流によって放熱します。
もちろん、樹脂パッケージ表面からの放熱もありますが、発熱のほとんどは上記の経路で放熱されます。
このとき、これらの絶縁板やシリコーングリス、ヒートシンクから周囲空気(アンビエント)までの熱抵抗の総和が「ケース-アンビエント間熱抵抗:Rth(c-a)」です。
この場合、「ケース-アンビエント間熱抵抗:Rth(c-a)」は、ヒートシンクの取り付け状況やヒートシンクの大きさ、形状でさまざまに異なりますか ら、このような使い方では、「ジャンクション-ケース間熱抵抗:Rth(j-c)」と「ケース-アンビエント間熱抵抗:Rth(c-a)」とを別個に規定 しないと、さまざまなヒートシンクを使って、最適な放熱をすることができません。
そのため、パワーデバイスでは、一般的に「ジャンクション-ケース間熱抵抗:Rth(j-c)」を規定し、その値を提供しています。
ちなみに、まれに通常のヒートシンクよりもさらに強力な放熱器として使われる「ヒートパイプ」は「ケース-アンビエント間熱抵抗:Rth(c-a)」を小さくすることに効果があります。
一方、上図右側の「シグナルデバイス」では、主に次の2つの放熱経路が考えられます。
1.ジャンクションで発生した熱は、そのままパッケージの樹脂をその表面まで伝わって、そこから直接空気の対流で放熱する。
そのとき、熱はパッケージ樹脂の熱伝導抵抗:Rth1(j-c)およびパッケージ表面の空気対流による放熱抵抗:Rth1(c-a)を通して空気(アンビエント)に放熱されます。
2..ジャンクションで発生した熱は、チップの裏側に届き、そこからチップが接着されている「リードフレーム」を伝わって端子に届き、そこからさらに配線基板にも伝わってそれらから空気の対流で放熱する。
そのとき、熱はチップから端子までの熱抵抗:Rth2(j-c)、そして端子および配線基板からの空気対流による放熱抵抗:Rth2(c-a)を通して空気(アンビエント)に放熱されます。
このように、「シグナルデバイス」の放熱経路は一見複雑ですが、ヒートシンクを使わないのが前提ですから、ヒートシンクの大きさや取り付けを考慮する必要がありません。
そのため、「シグナルデバイス」のジャンクションから空気(アンビエント)までの熱抵抗は、ただ自身の素材、構造、形状だけで定まります。
これが「シグナルデバイス」で一般的に定義されている「ジャンクション-アンビエント間熱抵抗:Rth(j-a)」です。
デバイスによっては、配線基板からの放熱割合が無視できないほど大きく、「熱抵抗:Rth(j-a)」値の前提条件として、測定に使用した配線基板のサイズや素材を付記する場合もあります。
2. 自然空冷と強制空冷、液冷
以上は「空気の対流」を使った放熱についての説明です。これは一般に「自然空冷」と呼ばれます。
「空気の対流」には、重力も必要であり、当然地球上の居住空間における使用が前提であり、空気が薄い高空や、重力が小さい宇宙などは原則として対象外です。
それでも、「高山で無線機が過熱した」などの事例がほとんどないのは、逆にそういうところでは高温環境が存在しにくいためかもしれません。
また、半導体デバイスの周囲を断熱性の高い物体で囲む使い方も保証されません。
しかし、普通の地上の空気中であっても、より大きな発熱をする場合や、より高温環境で使う場合など、「自然空冷」ではうまく許容損失を守って使うことができない場合があります。
そのような場合は、半導体デバイスに風を送って冷やしたり、半導体デバイスを液中に沈め、液体をポンプで循環させたりして冷やし、内部損失を許容範囲内にして使うことがあります。 風の場合は「強制空冷」、液体の場合は「液冷」とか「水冷」とか呼ばれます。
これらの「強制空冷」や「液冷」は、パワーデバイスにおいては放熱器の「ケース-アンビエント間熱抵抗:Rth(c-a)」を下げる効果があります。
しかし、放熱電極を持たないシグナルデバイスに対してはそれほど大きな改善効果が期待できるわけではありませんから、むしろ限られた放熱空間内の対流不足を補う手段と捉えて、データ・シートの最大定格どおりの周囲温度と内部損失を守って使うことが推奨されます。
3. 最大ジャンクション温度
放熱の設計には、熱抵抗以外にもう1つ、「最大ジャンクション温度」が必要です。
上記のように、ジャンクションの発熱は熱抵抗を通して外部に放熱されますが、周囲の気温が設計の上限のときでも、ジャンクションの温度が「最大ジャンクション温度」以下であるように放熱設計することが、結果として「許容損失」範囲を守ることと同義です。
一般的な半導体デバイスでは、「最大定格」の「保存温度」の上限がこの値を示しています。
4. フォトカプラ・光MOS FETの場合
フォトカプラや光MOS FETは、一部の特殊なものを除き、ほとんどが上記説明の「シグナルデバイス」です。
しかも、ほとんどの場合、「自然空冷」で使われますから、その熱抵抗も「ジャンクション-アンビエント間熱抵抗:Rth(j-a)」が定義され、「最大ジャンクション温度」とともに提供されます。
しかし、それらのデータ・シートには、「ジャンクション-アンビエント間熱抵抗:Rth(j-a)」の規格も「最大ジャンクション温度」の規格もありません。 これらは次のように、別な表現で提供されています。
(1)最大ジャンクション温度
一般的な半導体デバイスでは、この値は「保存」時でも「動作」時でも同じ値です。
しかし、フォトカプラや光MOS FETの場合、この値は「通電時」と「非通電時」とで異なる値を持ちます。
これは、これらの光電デバイスに特有の理由で、一般の半導体デバイスが熱的電気的な現象だけを考慮しているのに対して、フォトカプラや光MOS FETでは、温度による光学的な特性変動が「通電時」と「非通電時」とで異なるためです。
「非通電時」では、「最大ジャンクション温度」は一般的な半導体デバイスと同様、「最大定格」の「保存温度」の上限値です。
しかし、「通電時」には、光電デバイス特有の高温劣化現象が存在するため、「最大ジャンクション温度」は「非通電時」よりも低くなります。
その値は、次の特性曲線「許容損失vs.周囲温度」によって示されます。
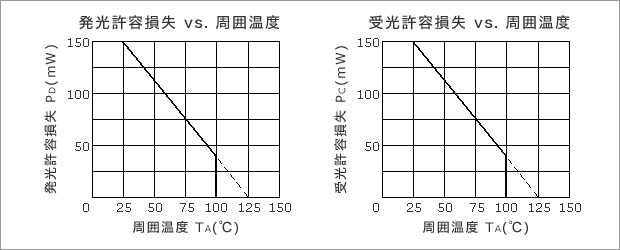
図2 許容損失vs.周囲温度の例
これらの図で、傾斜部を「動作周囲温度」の最大値である100℃を越えて破線のように延長すると、この例の場合、およそ125℃付近で許容損失が0 mWになります。
それはつまり、「動作周囲温度」の許容範囲内において、この傾斜線近傍の内部損失があったとき、ジャンクション温度は125℃付近になっていると推定されるため、これが「通電時」の「最大ジャンクション温度」です。
それでは、その場合、「動作周囲温度」の最大値である100℃はどういう意味を持つのでしょうか?
内部損失をこれらの図の100℃のときの値よりももっと小さくできれば、周囲温度が100℃以上でも使えるのでしょうか?
そう「推定」することはできますが、実際には、ジャンクション温度は同じでも温度分布が異なりますから、メーカが実際に確認し、保証する「動作周囲温度」を越えた使い方はユーザ自身が責任とリスクを負わなければなりません。
(2)ジャンクション-アンビエント間熱抵抗:Rth(j-a)
シグナルデバイスでは、一般的に、上図「許容損失vs.周囲温度の例」において、傾斜部の傾きを「℃/W」で表したものがこの値を表します。
ただし、フォトカプラや光MOS FETでは、その最大定格において、この傾斜が逆数の「低減率(mW/℃)」で規定されている場合があります。
その場合は、「低減率」の逆数を「ジャンクション-アンビエント間熱抵抗:Rth(j-a)」として用いることができます。
「低減率」が規定されていない場合は、一般のシグナルデバイスと同様、特性曲線「許容損失vs.周囲温度」の傾斜部の傾きがこの値です。
5. 発光側と受光側との間の熱結合の影響
ところで、半導体デバイスには、1つのパッケージ内に複数のチップがあるマルチチップタイプと、単一のチップしかないシングルチップタイプとがあります。 そういう考え方で区分すると、フォトカプラや光MOS FETは、発光側と受光側とが必ず別チップですから、マルチチップタイプに区分されます。
マルチチップタイプの場合、原理的には、チップ間に熱的な結合が存在し、それぞれ独立ではあり得ません。
しかし、フォトカプラや光MOS FETは、もともと「小信号」で使われることを想定しており、物理限度いっぱいで使う目的で開発されたデバイスではありませんから、その面での厳密さより も、むしろ誰もが安心して容易に使えることを優先して、このようなチップ間の熱的な結合を考慮しても安全に使える範囲を最大定格および特性曲線「許容損失 vs.周囲温度」などに記載し、保証しています。
また、このような熱結合の動作特性に対する影響にしましても、むしろ製造ばらつきや使用回路の影響のほうが大きい場合も多く、規格それぞれに十分な余裕を持たせて使うことが唯一最大の安全策であったりもします。
6. おわりに
以上、いろいろ説明して参りましたが、それらの理論をすべて踏まえたうえで、フォトカプラや光MOS FETを使う際には、データ・シートの「許容損失vs.周囲温度」の特性曲線をよく見て、想定される最高周囲温度における許容損失を越えないようにすることが、結局もっとも容易でもっとも安全な使い方です。