R-Car V3M 入门套件
近年来,在高级驾驶辅助系统 (ADAS) 和自动驾驶 (AD) 应用的软件开发上,其规模和复杂性都与日俱增,以便能够加快自动驾驶的发展,并开发出使车辆卓尔不群的新功能。 为了应对这一趋势,瑞萨电子开发了 R-Car 入门套件,用以支持汽车应用软件的开发。
凭借 R-Car V3M 入门套件,新车评估项目(NCAP,备注 1)...

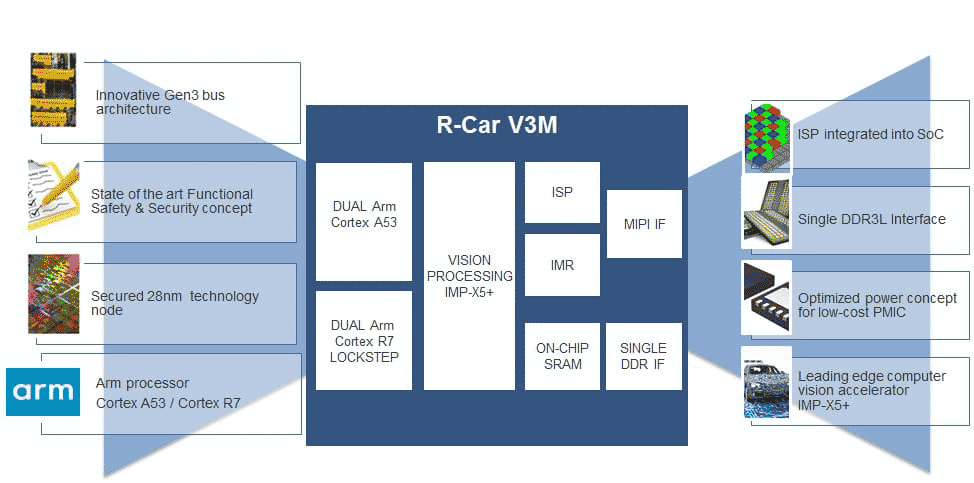
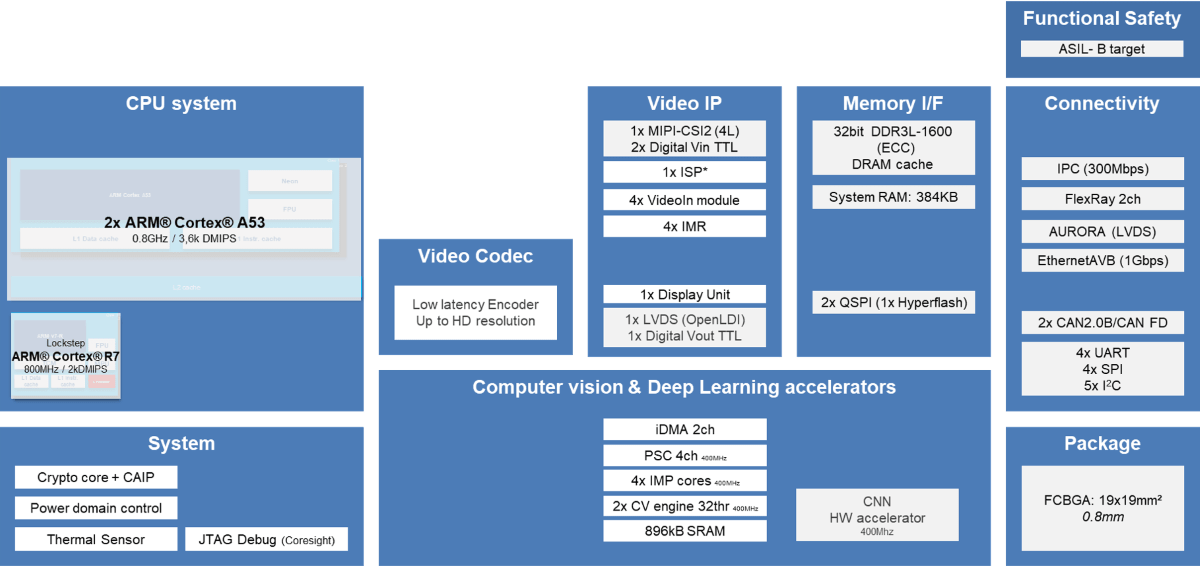
R-Car V3M 是一款主要用于前置摄像头应用的SoC,但也可用于环视系统、驾驶员监视甚至激光雷达;同时,它还支持NCAP(新车评估计划)功能。 NCAP(新车评估计划)是一项由政府实施的汽车安全计划,旨在评估新汽车设计应对各种安全威胁的性能。
前置摄像头面临的挑战是如何为计算机视觉提供高性能,同时支持低功耗和高水平的功能安全。 由于前置摄像头紧靠挡风玻璃安装,因此必须考虑部件本身产生的热量以及阳光直射造成的温度升高。 从而对低功耗的要求尤为严格。 R-Car V3M 解决了这一难题,提高了摄像头系统开发的功效。
R-Car V3M 根据 ISO 26262 经过 ASIL B 认证,大大降低了 ASIL ECU 开发的工作量。
R-Car V3M 使用 R-Car SDK(软件开发套件),这是一套可以快速入门并且易于使用的开发框架,适用于R-Car V 系列 SoC。
| Software title
|
Software type
|
公司
|
|---|---|---|
| Automotive SoC Consulting Service R-Car Online Consultation is a service where you can receive various consultations regarding R-Car V3H and R-Car V3M. We propose various solutions according to the customer’s situation, such as consultation for customers who are considering R-Car for the first time, learning of image recognition and deep learning using R-Car, and construction of evaluation environment. With this development consulting service for automotive SoC, we will shorten the introduction time of customers and solve problems at an early stage.
|
Software Package | Hitachi Industry & Control Solutions, Ltd. |
| 用于 R-Car 的 e² studio 适用于 ADAS 和自动驾驶的集成软件开发环境。 创新的开放式开发环境,旨在简化计算机视觉和深度学习算法的软件开发。
|
IDE and Coding Tool | 瑞萨电子 |
| INTEGRITY® RTOS INTEGRITY® RTOS 围绕分区架构进行构建,为嵌入式系统提供全面的可靠性、出色的安全性和极佳的实时性能。
|
Software Package | Green Hills Software LLC |
| QNX 的 ASIL 实时操作系统 Blackberry 针对瑞萨电子的 R-Car V3H 和 R-Car V3M,提供了符合 ASIL 标准的 RTOS 和 BSP 堆栈优化。
|
Software Package | BlackBerry Limited |
| 使用 OpenCL 和 SYCL 的 R-Car 硬件 专为瑞萨 R-Car 开发人员打造的 Codeplay 解决方案。 ComputeSuite for R-Car™ 让开发人员能够利用 OpenCL 和 SYCL 对 R-Car 硬件上的应用程序进行加速。
|
Software Package | Codeplay Software |
| R-Car 驾驶员监控解决方案 — R-Car V3 M/H 上基于视觉的 ADAS 算法开发 R-Car 驾驶员监控解决方案 驾驶室内基于摄像头的驾驶员监控系统,搭配 RGB、RGB+IR 和仅 IR 传感器 CNN 和非 CNN 型号,可用于优化处理器负载。 R-Car V3 M/H 采用基于视觉的 ADAS 算法开发套件,包括弱势道路使用者检测、车辆检测、交通标志识别和红绿灯识别,以及用于开发 ADAS 解决方案的完整研发服务。
|
Software Package | PathPartner Technology Pvt Ltd |
| RT-RK - Expertise on Renesas' Computer Vision and CNN Consulting and services on computer vision and machine learning to optimize the performance of Tier 1 and OEM algorithm on Renesas products
|
Software Package | RT-RK |
| SVNet, Deep Learning Embedded Software by STRADVISION SVNet is a deep learning and camera-based embedded perception software for ADAS and Autonomous Vehicles use cases. There are millions of vehicles powered by SVNet from Level 2 ADAS to Level 4 Autonomous Vehicles in the production pipeline in Germany and China.
|
Software Package | StradVision, Inc. |
| 带有 GPU 和不带 GPU 的 3D 环绕视图 GPU 版 (R-Car H3 / M3) • 4x 2MP @ 30fps 输入 • 4k @ 60fps 输出 • 碰撞色彩协调 • 动态 3D bowl、动态混合区 • 车辆透视(历史视图) • 检测功能 IMR 版 (R-Car V3H / V3M) • 4x 2MP 30fps 输入
|
Software Package | Cogent Embedded Inc. |
| 适用于 R-Car V3H 和 R-Car V3M 的 ISP 解决方案 R-Car V3x ISP 解决方案、ISP 渠道 • 原始数据校正 • 镜头校正 • 降噪 • 颜色插值 • 演示 • 曝光控制 • 白平衡 • 色彩校正 • 色彩空间转换:RGB 或 YUV 输出 PC 调谐工具 • 实时调谐 • 离线调谐
|
Software Package | Cogent Embedded Inc. |
| Atlas Camera Optimization Suite for R-Car by Algolux The Atlas Camera Optimization Suite is the industry’s first set of machine learning tools and workflows that automatically optimizes camera architectures for optimal image quality or for computer vision. Through a secure cloud-enabled interface, Atlas significantly improves computer vision results in days vs. traditional approaches that deliver suboptimal results even after many months of manual ISP tuning.
|
Software Package | Algolux |
| Autobrains AI Solution Autobrains provides video perception SW. Revolutionary, self-learning AI leveraging R-Car V Series assets.
|
Software Package | AutoBrains Technologies Ltd. |
| Safety Support Program Consultancy for R-Car Automotive Applications AVL Software and Functions GmbH provides System FuSa Consultancy for Renesas R-Car SOCs
|
Software Package | AVL Software and Functions GmbH |
13 items
|
||
近年来,在高级驾驶辅助系统 (ADAS) 和自动驾驶 (AD) 应用的软件开发上,其规模和复杂性都与日俱增,以便能够加快自动驾驶的发展,并开发出使车辆卓尔不群的新功能。 为了应对这一趋势,瑞萨电子开发了 R-Car 入门套件,用以支持汽车应用软件的开发。
凭借 R-Car V3M 入门套件,新车评估项目(NCAP,备注 1)...
eCUBE使ADAS开发人员在新平台上进行原型设计和评估其创新用例时,可以节省宝贵的时间和精力。 开发平台可以在台式电脑上使用,也可以集成于测试车辆中。
借助 eVIEW,摄像头传感器和管道以及显示管道可用于不同用途,同时开放的 API 允许 ADAS 开发人员直接从 Linux 用户空间获取框架。
eVISION...
R-Car SDK(软件开发套件)是一套可以快速入门并且易于使用的开发框架,适用于R-Car V 系列 SOC。
在寻找实现下一代汽车智能摄像头应用和自动驾驶系统的新方法时,汽车制造商正不断地将目光转向深度学习。...
Camera board for R-Car V3H Starter Kit with the tuned ISP pipeline of IMX390 & AR0220
eCUBE DVP is a camera board for R-Car V3H Starter Kit. It contributes to R-Car...
This solution delivers a high-efficiency image recognition engine, functional safety features and a high level of integration to implement both front camera...
Macronix is a leading Non-Volatile Memory solution provider.
| 博客 | 2023年10月13日 | ||
| 博客 | 2023年1月6日 | ||
| 新闻 | 2021年9月21日 | ||
| 博客 | 2021年6月7日 | ||
| 新闻 | 2019年9月26日 | ||
| 瑞萨电子携手麦格纳为更多车型和消费者提供先进的安全功能 | 新闻 | 2018年5月17日 | |
| 瑞萨电子推出用于3、4级自动驾驶汽车前视摄像头的R-Car V3H SoC | 新闻 | 2018年2月28日 | |
| 新闻 | 2017年12月21日 | ||
| 新闻 | 2017年10月24日 | ||
| 新闻 | 2017年10月19日 | ||
| 新闻 | 2017年9月14日 | ||
| 新闻 | 2017年9月13日 | ||
| 新闻 | 2017年4月11日 |