

Radar Transceivers: Key Components for ADAS & Autonomous Driving
Communications and sensing technologies have transformed the automotive industry. More and more, cars include features and systems to interact with their environment, gain awareness of the surrounding space, network with each other and with the infrastructure, and detect possible sources of danger. We can consider that vehicles have acquired their own “senses”, they know where they are and can now see, hear and feel what happens around them.
Automotive sensors are key to improving road traffic safety and reaching levels 4 and 5 of autonomous driving. The use of advanced sensor technologies will allow the prevention of accidents through warning signals and automated safety functions, thus reaching the Vision 0 objectives: zero deaths in traffic accidents by 2050. In this sense, in 2019 the European Parliament approved a law making safety features such as intelligent speed assistance, advanced emergency-braking systems and lane-keeping systems compulsory for all new vehicles from May 2022 for new models and as of May 2024 for existing models.
Also, safety measures have become increasingly important when buying a car. For this reason, the European New Car Assessment Programme (Euro NCAP) includes, since 2020, emergency braking systems in their evaluations. This has forced the industry to increase its efforts and include new detection features in vehicles.
Automotive Sensors for ADAS/AS
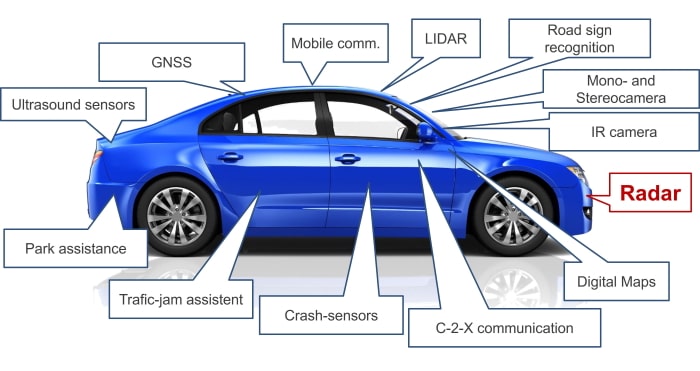
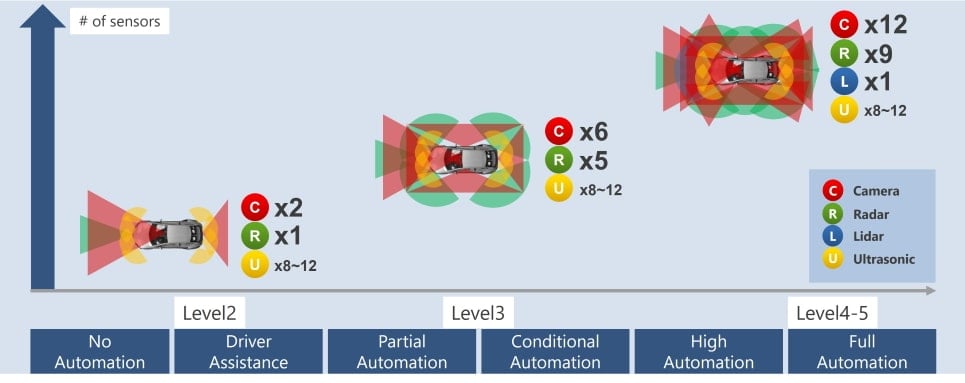
Different options are available for sensing the environment around a vehicle. Yet, for fully autonomous driving a combination of different sensing technologies will be required, to be able to provide full 360° detection. The full system can be seen as the “senses” of a car, providing the means to interact with the surroundings and creating a safety “cocoon”. Each technology has its pros and cons, as listed in Table 1 below, so full autonomous driving will require the combination of different sources, as shown in Figure 2.
Table 1. Pros and cons of different sensor technologies for automotive applications
| checkPROS | closeCONS | |
|---|---|---|
| Optical imaging (video) | Large field of view High resolution | Limited by weather and light conditions High processing workload |
| Ultrasonic | Operation in all weather and light conditions Very low cost | Very short range |
| Infrared | Operation in low light conditions | Short detection range |
| LiDAR | High accuracy (range, resolution and position) | Limited by weather conditions (fog, snow) No direct information about velocity |
| Radar | Less sensitive to weather conditions Long detection range Good resolution and position estimation | Complex angle measurement Complex target classification Not mature for fully AD |
Automotive Radar
Radar is a well-known technology, which relies on sending and receiving electromagnetic waves to measure, detect and locate obstacles in the environment. Radar is specially indicated for automotive applications, as vehicles are good reflectors for electromagnetic waves, and thus their distance, position and velocity can be determined accurately.
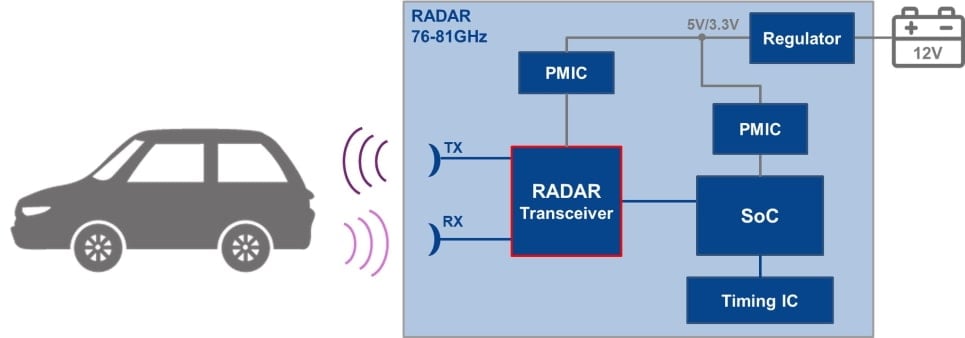
In automotive environments, Frequency Modulated Continuous Wave (FMCW) radar is used in different frequency bands, depending on the application. The principle of FMCW radar will be explained in the next radar blog entry. The basic topology of the radar is shown in Figure 3. It includes one or more radar Monolithic Microwave Integrated Circuit (MMIC) transceivers, connected to a high-performance processing unit (MCU or SoC). The topology and number of chips will depend on the location of the radar module on the vehicle and the application it has to cover, as also shown in Figure 4.
The International Telecommunications Union (ITU) defines two categories of automotive radar systems, depending on their function:
- Category 1: It includes radar systems that provide comfort functions for the driver, enabling more stress-free driving. This category comprises Adaptive Cruise Control (ACC) and Collision Avoidance (CA) radar, for measurement ranges up to 250 meters.
- Category 2: It defines sensors for high-resolution applications, which add to the passive and active safety of a vehicle, for example, blind spot detection, lane-change assist and rear-traffic-crossing alert, and detection of pedestrians and bicycles near a vehicle. The range is lower than Category 1, with a maximum of 50m to 100m, depending on the application. The purpose of these systems is to improve traffic safety by increasing the passive and active safety of a vehicle.
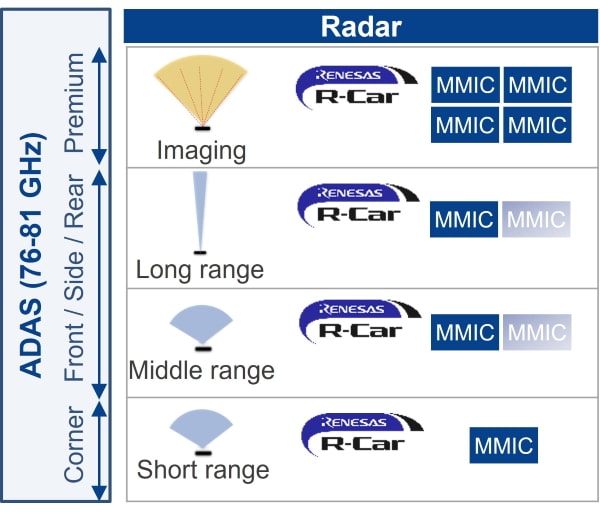
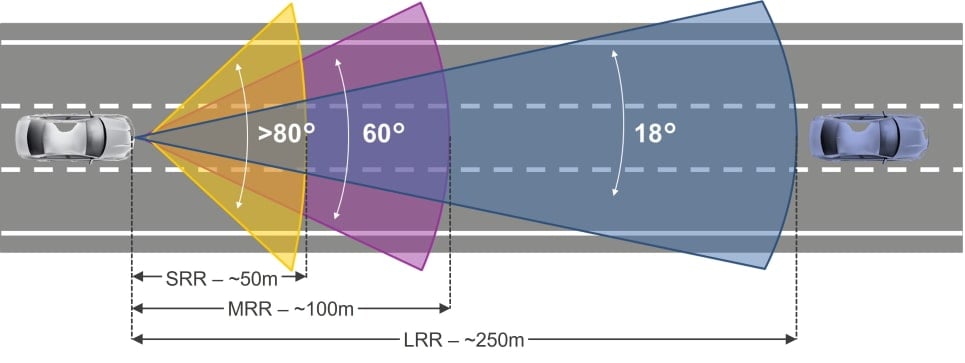
The types of radar can also be classified depending on the measurement range (Figure 5):
- Short Range Radar (SRR), with a large field of view and high resolution, and a range of up to 50m.
- Mid-Range Radar (MRR), with medium field of view and a range of up to 100m,
- Long Range Radar (LRR), does not require high resolution or a wide field of view, but aims for the highest possible range, up to 250m.
To provide 360° coverage, different radar sensors with different functions need to be placed on the car, as in Figure 6. The obtained data must be combined to obtain real-time accurate information on the surroundings.
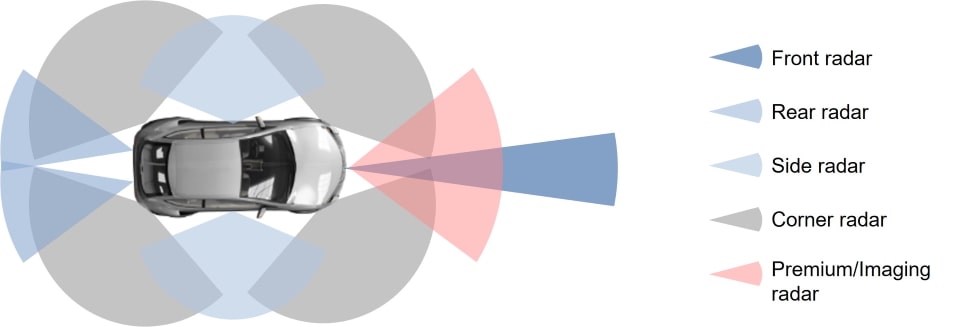
Radar sensors can easily be installed behind common elements of the car, like bumpers or company emblems, so that they are invisible and do not affect the aesthetics. This integration gets easier with higher frequencies of operation, as the size of the antennas, which determines the size of the module, is linearly proportional to the wavelength, and thus inversely proportional to the operating frequency. There used to be four main frequency bands used in automotive radar systems, two in the K-band (around 24GHz) and two in the E-band (between 76GHz and 81GHz), as depicted in Figure 7.
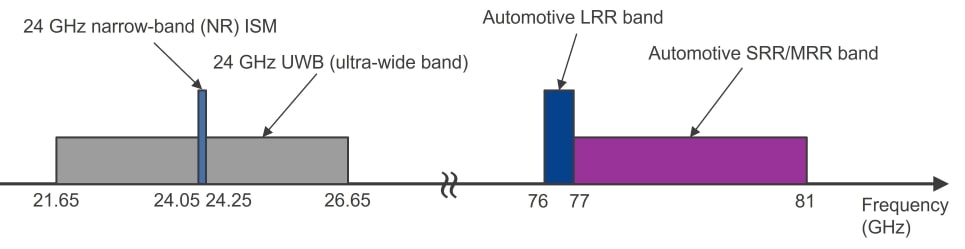
However, the 24GHz bands are to be discontinued, due to interference with radio astronomy and earth exploration applications. As an alternative, the frequency band from 76GHz to 81GHz has been accepted by most countries as the frequency band for automotive radars. There, 1GHz bandwidth is reserved for LRR (76GHz to 77GHz), while 4GHz bandwidth is available for applications requiring better resolution, as summarized in Table 2.
Table 2. Typical automotive radar characteristics in the frequency band 76GHz to 81GHz, according to ITU Recommendation ITU-R M.2057-0
| Radar Type (ITU Classification) | A | B | C | D | E |
|---|---|---|---|---|---|
| Automotive radar for front applications | Automotive high-resolution radar for front applications | Automotive high-resolution radar for corner applications | Automotive high-resolution radar | Automotive high-resolution radar for very-short range applications | |
| Application examples | ACC, collision avoidance | Lane monitoring | Blind spot detection, lane-change assist | Rear-traffic-crossing-alert | Parking aid, pedestrian detection, emergency braking at low speed |
| Typical range | ≤250m | ≤100m | ≤100m | ≤100m | ≤50m |
| Typical range resolution | 75cm | 7.5cm | 7.5cm | 7.5cm | 7.5cm |
| Frequency band | 76GHz - 77GHz | 77GHz - 81GHz | 77GHz - 81GHz | 77GHz - 81GHz | 77GHz - 81GHz |
| Maximum bandwidth | 1GHz | 4GHz | 4GHz | 4GHz | 4GHz |
| Maximum e.i.r.p. | 55dBm | 33dBm | 33dBm | 45dBm | 33dBm |
Radar Market
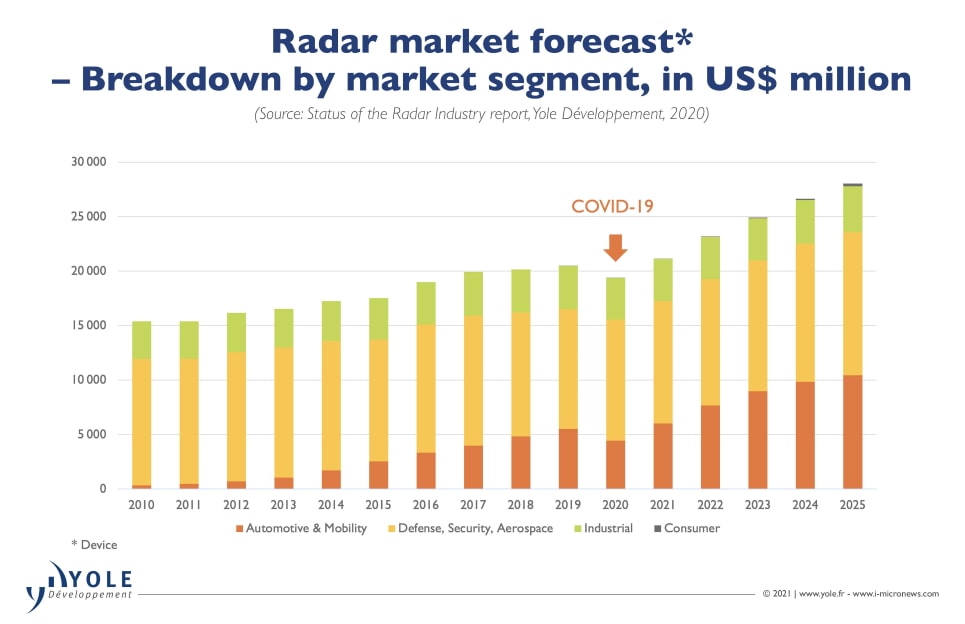
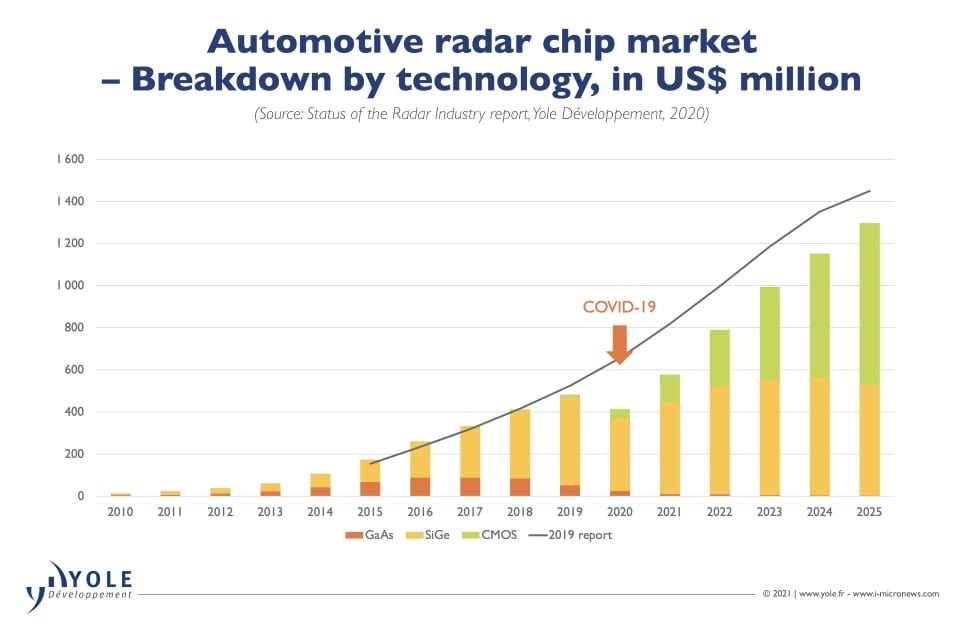
The integration of new safety and comfort features in new vehicles has led to a surge in the radar market. Automotive is the fastest growing segment of this market, expected to surpass US $10 billion in 2025, as shown in Figure 8.
If we only consider the radar MMIC transceiver, the market forecast is more than US $1.2 billion, with GaAs technology almost disappearing and CMOS experiencing rapid growth to become the dominant technology by 2025.
Conclusion
Radar modules have become a standard feature in modern vehicles. While they have some disadvantages with respect to other technologies in terms of range resolution, their reliability and versatility make them irreplaceable parts in modern ADAS/AD systems. The shift to higher frequencies from 76GHz to 81GHz has brought new technological challenges but made this an exciting field for new developments in the semiconductor sector.
In the next entry on the blog dedicated to radar, we will have a look at the basic principles behind FMCW radar.
