
The Robot Operating System (ROS) is a key open framework that provides libraries and tools to bring new innovations to the robotics community. It was initially release in 2007 and many robotics systems have been taking advantage of ROS framework for years. There has been a new interest in extending ROS access to embedded microcontrollers and real-time applications. The development of the ROS 2 addresses these needs. Renesas is working on the ROS 2 proof of concept demonstrations and all the software used is open-sourced at GitHub. Renesas RA family products support micro-ROS framework, which is more suitable for putting ROS 2 into microcontrollers.
ROS 2 Demonstrations
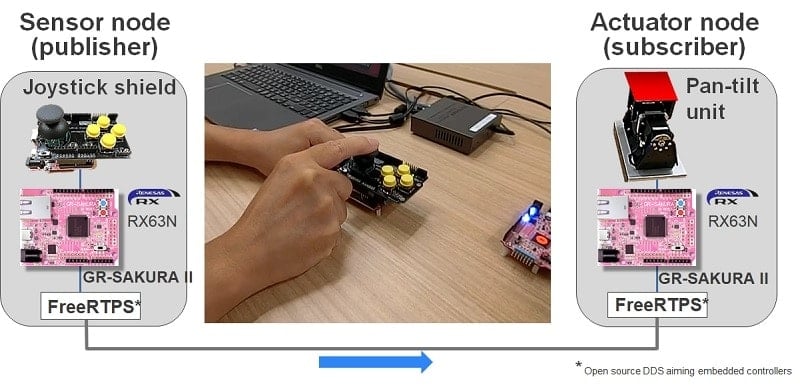
Proof of Concept Demonstration 1
DDS communication demonstration using the RX63N which Renesas presented at ROSCon 2017.
Proof of Concept Demonstration 2
DDS-XRCE demonstration using the RX65N which Renesas presented at ROSCon 2018 and ROSCon JP 2018.
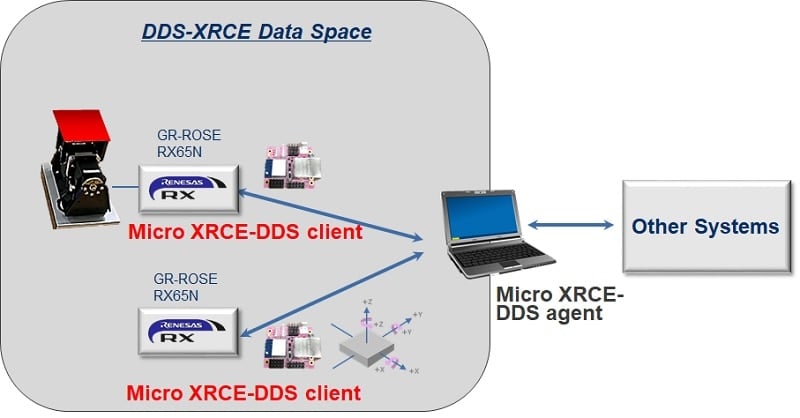
Micro XRCE-DDS is DDS-XRCE open source middleware from eProsima
