

引言
实际上,“人工智能(AI)”并没有明确的科学定义,但是一种普遍的理解是将AI 被人类观察到的学习系统作为“智能”。很难更加明确的描述其定义,因为“智能”一词已经缺乏明确的合理性。
在汽车领域,在当今和未来具有代表性且广为人知的AI相关功能应用在自动驾驶(AD)领域。这包含了物体感知、物体识别以及对结果反应的决策。这些应用通常需要很高的计算能力(100k DMIPS级别范围内)。
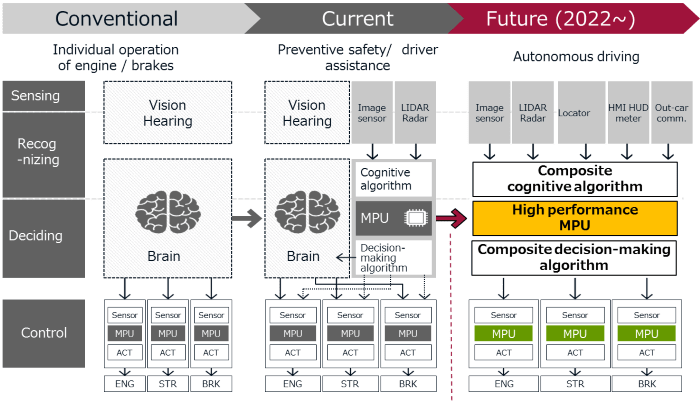
较低的应用层与传统的实时执行器控制有关,如推进、转向和制动等“车辆运动”,乍一看可能不是从人工智能和机器学习这种新兴技术中获益的主要目标,但是由于持续的成本压力,在现如今并且很可能在未来,它将继续通过常规微控制器以有限的嵌入式性能(高达 10k DMIPs)来实现。
然而,事实恰恰相反!
尤其是“车辆运动”类别的实时执行器控制应用受到各种新要求(例如 欧7 法规)的挑战,这些要求导致算法复杂性增加并产生对更高性能水平和更大通信带宽的需求。 所有这一切都将在没有提到成本增加的前提下成为可能,这在汽车控制应用中非常典型。
那么,如何在传统的成本平衡MCU系统上实现人工智能和机器学习功能更高的性能要求呢? 答案在于特定的硬件加速器,它们可以作为协同处理器嵌入在 MCU 硅基中实现。
带有嵌入式硬件加速器的 RH850/U2B 微控制器
瑞萨电子用于其下一代 28nm 微控制器 RH850/U2B FCC 的硬件加速器概念是:“DFP” 数据流处理器 IP (Data flow processor),又名“DR1000C”,已获得日本 NSITEXE, Inc. 的许可。 NSITEXE 是一家 IP 供应商,成立于 2017 年,是从 DENSO 公司独立出来,专门从事高级处理器的开发。
RH850/U2B FCC 微控制器针对车辆运动和区域控制的应用领域,通过虚拟化支持和服务质量 (QoS) 实现 400 MHz x 8的性能,解决了将多个应用程序集成到一个设备中同时不受干扰(FFI: freedom from interference)的挑战以满足 ISO26262 ASIL-D 标准。
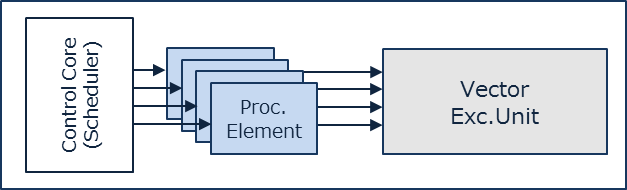
DR1000C 是一款基于 RISC-V 的专用并行协处理器,针对多线程机制和矢量指令进行了优化设计,可从主 CPU 卸载密集计算任务,从而加速高级控制算法。
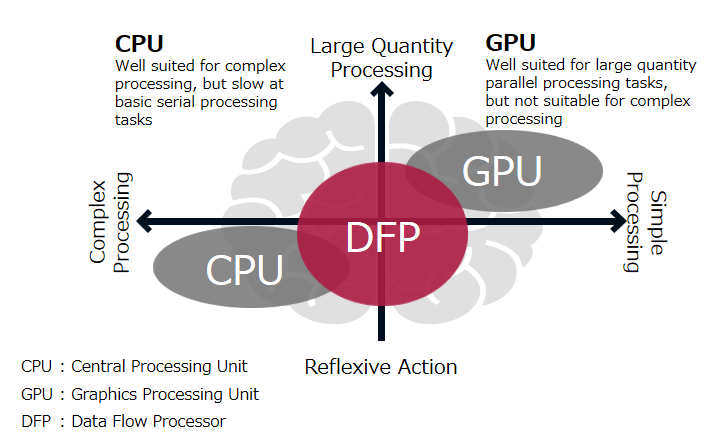
从概念上讲,DR1000C 是一种多指令多数据 (MIMD) 高性能 ASIL-D 矢量处理器,可实现数据级和任务级并行。 矢量执行单元与多线程架构的结合实现了高度灵活性,从而加速通常用于人工智能和机器学习功能的各种算法类型。 有关更多详细信息,请参阅下面的“用例”部分。
DR1000C 性能
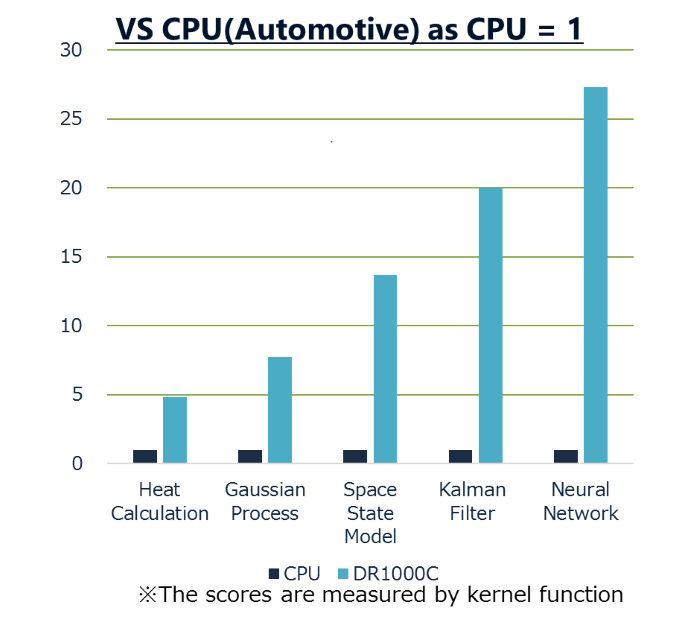
与传统汽车 CPU(即Harvard架构)相比,DR1000C IP 的特定并行 MIMD 架构带来了数量级的性能优势。 特定的数学函数,如高斯过程(径向基函数)、卡尔曼滤波器或 BLAS 在与 DR1000C 一起执行时非常受益。
实例
在可以受益于 DR1000C的人工智能或机器学习的汽车环境中有多个实例。 以下是前面提到的“车辆运动”部分中的几个应用示例。
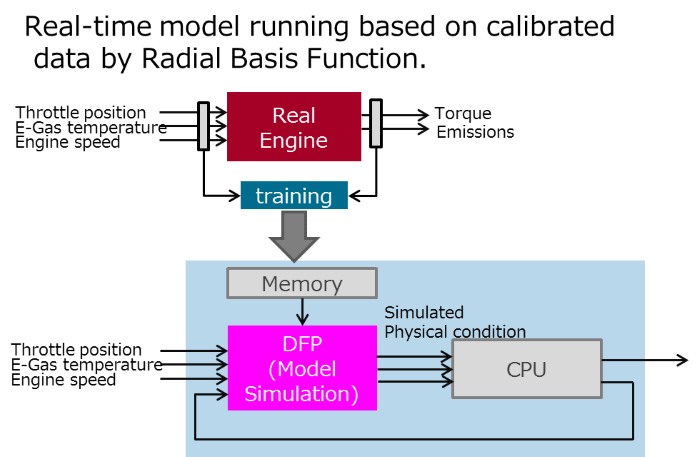
虚拟传感器:这是一个通过虚拟处理实时模型来模拟相关现实世界系统的物理过程,从而取代物理硬件传感器的概念。 这里的简单动机是降低系统成本。 底层建模方法通常使用径向基函数网络,可以将其解释为人工神经网络。 径向基函数有很多用例,包括函数逼近、时间序列预测和系统控制。
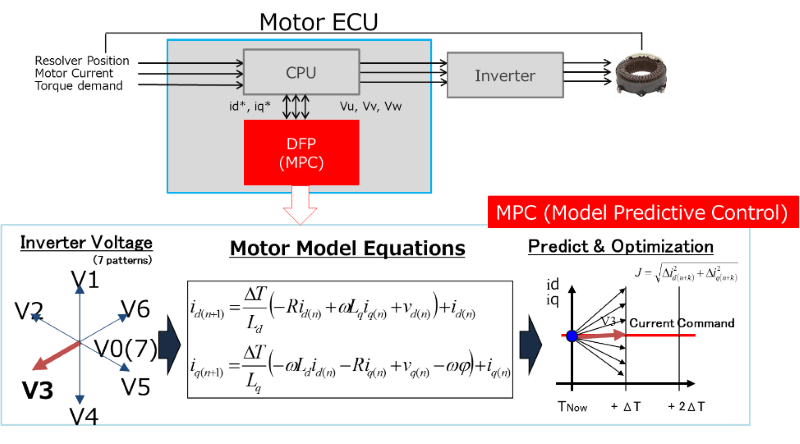
模型预测控制 (MPC) 是一种控制功率转换器或电动机驱动器的方法学。 它通过动态预测和优化系统参数,并结合系统约束,提供处理多种控制任务的能力。 特别是非线性 MPC 模型可能会以训练数据集(基于人工神经网络)的形式反映出来。
网关入侵检测系统(IDS)
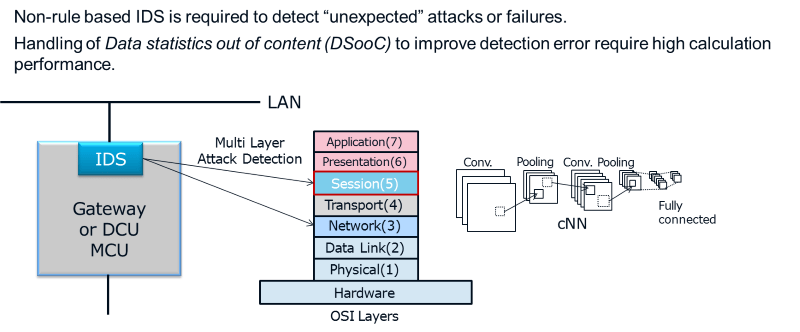
IDS 系统通常应该通过将“正常”活动与入侵者的行为进行比较来识别网络攻击。 今天,大多数基于规则的系统用于识别已知的攻击类型,然而,如果攻击使用不同的或迄今为止未知的方法,则不太成功。
在这里,机器学习提供了一种扩展的可能性,可以根据流量模式(包括带宽、设备、端口和协议)对网络活动进行分类。 通过将“健康”流量的训练(机器学习的)模式与实际网络通信进行比较,可以实现对新演变的威胁类型的检测。 这是静态的基于规则的系统无法做到的。
DR1000C工具环境
应用程序开发可以通过 C 编码实现,其中用户应用程序用 C 语言编写,结合内部函数调用 DR1000C 服务。 或者,可以使用 MATLAB/Simulink 的“DFP 工具箱”进行基于模型的开发。 一个“SDK”将包括一个运行时线程调度器 (RTS)、一个基于 GNU 的工具链、模拟器和调试器。 另外可选择地,在支持 ASIL-D 的诊断库以及 ISO26262 工具认证方面的功能安全正在开发中。
结论
在不久的将来,基于成本平衡的汽车 MCU 系统必须能够涵盖广泛的算法,尤其是机器学习 (ML) 和嵌入式人工智能 (AI)、控制理论、信号处理和物理建模。
瑞萨电子将通过显现出灵活硬件加速器概念的“DR1000C”来丰富下一代微控制器,该概念针对汽车实例进行了优化,可以通过小数因子提高传统 MCU 的实时性能,同时将各自的成本和功耗保持在可承受的水平 。