
第一次挑战制作!: 1 of 4
本期起,“电子制作入门”终于开始了。让我们利用至今为止所掌握的知识,第一次挑战制作!
本连载共分4期,通过实际制作能扇动的“兴奋团扇”来讲解所需的知识。下面让我们开始吧!
第一步:考虑所需的功能!
值得纪念的第一次挑战制作!
首先,制作什么才好呢?……面对即将来临的炎夏,我们就来制作一把能送来凉风的团扇,怎么样?好的,那我们就来制作一把能随心跳来扇风的团扇吧。心跳加快时,团扇便会拼命扇风,这简直太棒了!因此我们将之命名为“兴奋团扇”。
先来考虑一下如何制作“兴奋团扇”吧。此装置的功能是“感知心拍数并随之扇动团扇”。此功能可分成感知心拍数的部分和扇动团扇的部分,另外还需要控制“和心跳合拍”的部分(图1)。

图1:“兴奋团扇”的所需功能
1. 心拍数的“感知”
心拍数检测部使用心拍数传感器。心拍数传感器通过光传感器来捕捉血管的光反射率的变化,利用脉搏跳动时的血流变化引起反射率变化的原理。
※本期的“兴奋团扇”电子制作采用了市场上销售的心拍数传感器,详情请单击此处。
https://www.sparkfun.com/products/11574
2. “控制”
控制部使用在很多电子设备中进行硬件控制的单片机,单片机也可说是电子设备的头脑。为了在这次制作中能容易地使用此单片机,而使用了现有的电子制作电路板GR-SAKURA。
GR-SAKURA是以可轻松愉快地进行电子制作为目的,由瑞萨电子发起的“Gadget Renesas”项目诞生的,是一块搭载了性能极高、功能非常丰富的RX63N单片机的工作电路板,可进行各种电子制作。
另外,GR-SAKURA具备可容易进行单片机编程的云环境以及充实的支援,非常适合初次电子制作。有关GR-SAKURA的使用方法,将在第二期连载中详细讲解。
欲先了解有关GR-SAKURA,请参阅以下内容。
欲先了解有关GR-SAKURA,请参阅以下内容。
3. 团扇的“扇动”
扇动团扇时使用伺服马达。伺服马达是指马达只旋转输入信号所示的量,并且在信号连续输入时停在那里,非常好用。普通的马达能旋转,但是无法控制马达的旋转量和停止。伺服马达常用于无线遥控等。
本次的“兴奋团扇”电子制作采用了市场上销售的伺服马达系列,详情请单击此处。
http://www.gwsus.com/english/product/servo/micro.htm

大家是否已经理解了“兴奋团扇”所需的功能及其结构了呢?
下面让我们来考虑各部分所需的处理吧。
心拍数检测部~控制部:A/D转换
首先,需要考虑从心拍数检测部到控制部的信息发送处理。心拍数传感器输出模拟信号,但是接收该信号的控制部单片机只能处理数字信号。因此需要将模拟信号转换为数字信号,此转换被称为A/D转换。
在A/D转换中,以固定的时间间隔(分辨率)将模拟信号进行分割“①采样”,接着将所分割的信号大小捕捉为数值进行“②量化”,然后将所读取的数值进行“③符号化”(图2)。也就是说,以每秒10次(10Hz)以及1024等级(10bit)来读取模拟输入信号,并转换为二进制数(数字数值)。
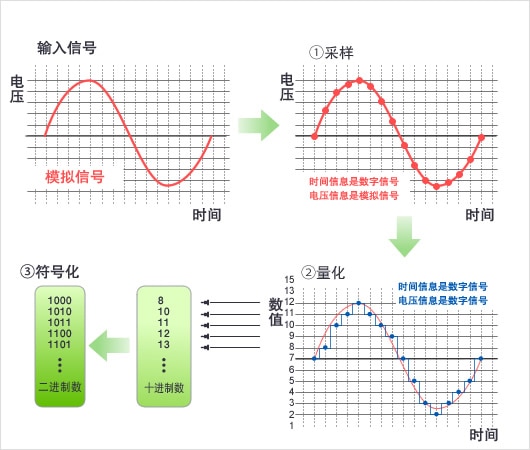
图2:A/D转换的原理
通常,控制电子设备的单片机内置有此A/D转换功能(这是单片机的内部外围功能之一)。“兴奋团扇”所用的GR-SAKURA的单片机内置了1个10位和1个12位的A/D转换器。
控制部~团扇扇动部:PWM控制
接着,需要考虑从控制部到团扇扇动部的处理。伺服马达的旋转量取决于输入信号所示的量(指定的脉宽)。即,当发送窄脉宽脉冲时,旋转角为0度;当发送中脉宽脉冲时,旋转角为90度。这里的脉宽是指单片机给伺服马达输出“H”电平的时间。
需要以固定的时间间隔给伺服马达发送脉冲,通知要求的位置(旋转角)。如果连续发送相同脉宽的脉冲,旋转角就保持不变。实际上,通过如0度→60度→0度的摆动角变化,在0度或者60度的位置暂停旋转,便可实现团扇的扇动。
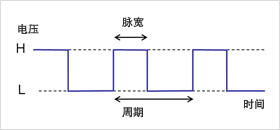
图3: PWM
为了进行上述的伺服马达控制,单片机定期发送不同需求的“H”输出时间的脉冲。而此方式被称为PWM(Pulse Width Modulation:脉宽调制)(图3)。
通常,脉冲在从“L”电平上升至“H”电平开始到下一次上升的时间(“L”电平和“H”电平合在一起的信号整体宽度)称为脉冲周期(帧)。
请在理解PWM控制的基本原理后再确认“兴奋团扇”所用的伺服马达手册(图4和图5)。※这是一个很好的机会,所以请参阅手册的英文原文。
参考文献:APPLICATION NOTE FOR RPV SERVO MOTOR
http://www.gws.com.tw/english/product/servo/servo%20form.htm
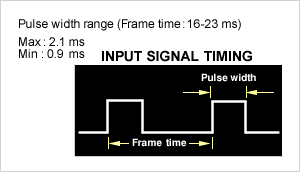
图4:脉宽和周期(帧)
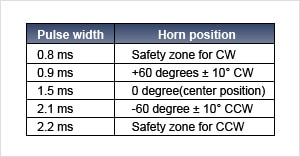
图5:动作角度
周期(帧)的长度规定为16~23ms。脉宽最大为2.1ms,最小为0.9ms(图4)。当此帧的“H”电平为1.5ms时,伺服马达保持在中间的位置(图5)。要顺时针旋转60度时,将“H”电平减到0.9ms;要逆时针旋转60度时,将“H”电平置为2.1ms。
通过上述内容我们知道了在进行伺服马达的控制时需要在固定周期内输出所需宽度的脉冲的“时间”概念,单位是ms(=msec),即1/1000秒单位。为了以如此细小的时间单位来精确地实现控制,GR-SAKURA的单片机内置了高性能的定时器功能。
目前虽然还不知道心拍数传感器输出的是什么样的信号,也没有决定判断心拍的方法。但是请记住:需要通过如此细小的时间和规定来控制输入(心拍)和输出(伺服控制脉宽)。
在下期的“电子制作入门”②中,通过实践讲解GR-SAKURA的使用方法,然后分硬件篇和软件篇讲解实际的制作。敬请期待!
以下是与本次讲解极其相关的“嵌入式系统入门”的以往文章,请参阅。
第一次挑战制作!
- 考虑所需的功能!
- 看一看 摸一摸 准备制作
- 硬件组装
- 编制软件,完成“兴奋团扇”的制作!