
概要
シリアルサーボを3個使った近藤科学製のロボアーム「KXR-A3S」をGR-ROSEで動かしてみます。
準備
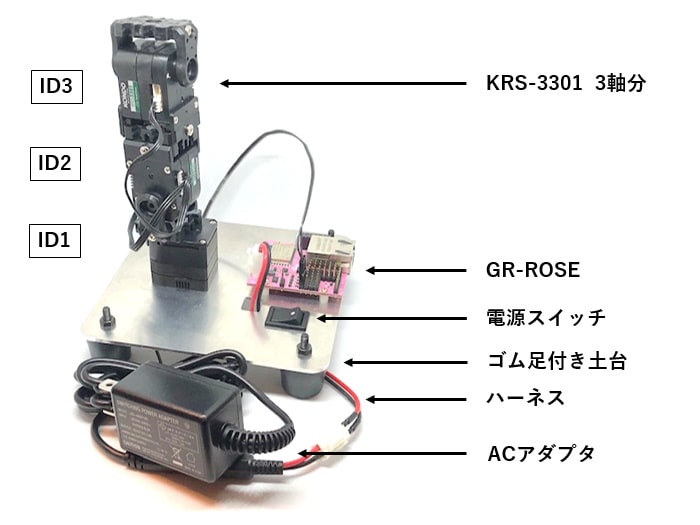
- GR-ROSE、USBケーブル(マイクロBタイプ)、完成済みの「KXR-A3」を準備します。
- なお、3つのサーボのID設定は図に示す通り、下から順に1, 2, 3としてください。ID1のサーボがGR-ROSEの
- Serial1の部分につながっていることを確認してください。
画像
キットの起動
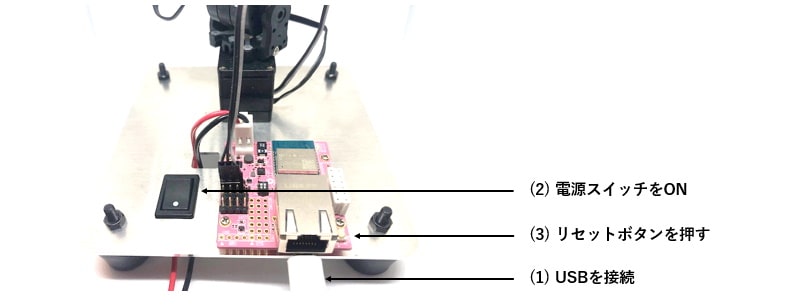
それでは早速動かしてみます。まずはプログラムを実行する前に、以下の手順を実行してください。
シリアルサーボに電源が供給され、GR-ROSEがUSBメモリとして認識されます。
- GR-ROSEにUSBを接続する。
- 電源スイッチをONにする。
- GR-ROSEのリセットボタンを押す。
画像
モータ動作確認(1軸)
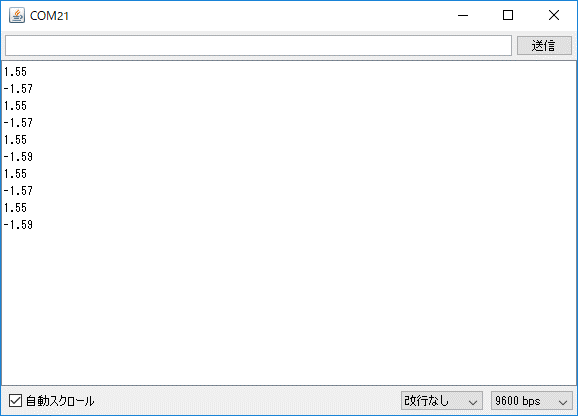
以下のプログラムを実行してください。1番下にあるID1のモーターが動作します。
サーボモーターの仕様として、原点の0°では7500という数値を指定します。稼働範囲の最大値135°で11500、最小値-135°で3500を指定します。これらの数値は汎用性がないため、プログラムではラジアン指定でモータを動かせるように「krs_setposition」という関数を用意しています。また、モータの位置を取得できる「krs_getposition」という関数を用意して、シリアルモニターにラジアンを出力しています。
画像
#include <Arduino.h>
#include <ICS.h>
#define KRS_MIN 3500
#define KRS_MAX 11500
#define KRS_ORG 7500
#define KRS_FREE 0
#define SERVO_MIN -135
#define SERVO_MAX 135
IcsController ICS(Serial1);
IcsServo servo1;
void krs_setposition(IcsServo* servo, float radian){
int angle = radian * 180 / PI;
int pos = map(angle, SERVO_MIN, SERVO_MAX, KRS_MIN, KRS_MAX);
if(pos > KRS_MIN && pos < KRS_MAX){
servo->setPosition(pos);
delay(1);
}
}
float krs_getposition(IcsServo* servo){
int pos = servo->getPosition();
delay(1);
int angle = map(pos, KRS_MIN, KRS_MAX, SERVO_MIN, SERVO_MAX);
return angle * PI / 180; // angle to radian
}
void setup() {
Serial.begin(9600);
ICS.begin();
servo1.attach(ICS, 0x01);
krs_setposition(&servo1, 0);
}
void loop() {
static bool id1, id2, id3;
krs_setposition(&servo1, (PI/2));
delay(1000);
Serial.println(krs_getposition(&servo1));
krs_setposition(&servo1, -(PI/2));
delay(1000);
Serial.println(krs_getposition(&servo1));
}モータ動作確認(3軸)
それでは次に3つのサーボを動かしてみます。以下のプログラムを実行してください。
IcsServoクラスのオブジェクトを配列で生成し、プログラムを簡素にしています。
-45°~45°の範囲でモーターをランダムに動かしています。
#include <Arduino.h>
#include <ICS.h>
#define KRS_MIN 3500
#define KRS_MAX 11500
#define KRS_ORG 7500
#define KRS_FREE 0
#define SERVO_MIN -135
#define SERVO_MAX 135
IcsController ICS(Serial1);
IcsServo servo[3];
void krs_setposition(IcsServo* servo, float radian){
int angle = radian * 180 / PI;
int pos = map(angle, SERVO_MIN, SERVO_MAX, KRS_MIN, KRS_MAX);
if(pos > KRS_MIN && pos < KRS_MAX){
servo->setPosition(pos);
delay(1);
}
}
void setup() {
Serial.begin(9600);
ICS.begin();
for(int i = 0; i < 3; i++){
servo[i].attach(ICS, i+1); // id1 to id3
servo[i].setStretch(30);
delay(1);
servo[i].setSpeed(30);
delay(1);
krs_setposition(&servo[i], 0);
delay(1);
}
}
void loop() {
for(int i = 0; i < 3; i++){
int angle = random(-45, 45);
float radian = angle * PI / 180;
krs_setposition(&servo[i], radian);
delay(200);
}
}
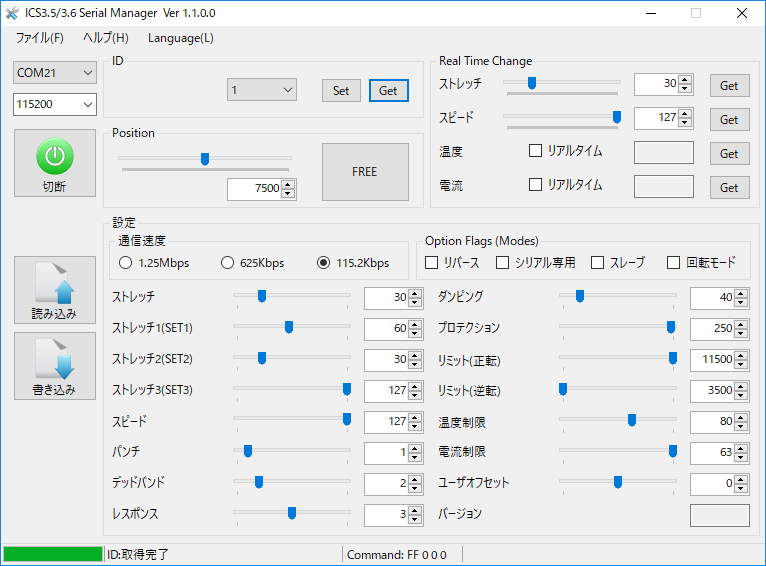
ICS Managerで接続する方法
ICS Managerは近藤科学から提供されているPC用のソフトウェアです。
シリアルサーボのID値や初期設定を行うことができます。
以下のプログラムを実行することで、GR-ROSEがUSBシリアルブリッジとして動作し、ICS Mangerで
シリアルサーボの制御を行うことができます。
画像
// For using ICS manager
#include <Arduino.h>
void setup() {
pinMode(PIN_LED1, OUTPUT);
Serial.begin(115200); // to USB
Serial1.begin(115200, SERIAL_8E1); // to Motor
Serial1.direction(HALFDUPLEX);
}
void loop() {
if(Serial.available())
{
char c = Serial.read();
Serial1.write(c);
}
if(Serial1.available())
{
char c = Serial1.read();
Serial.write(c);
}
}