

進化するE/Eアーキテクチャ開発が抱える課題
ソフトウェアがクルマの新しい価値を創出するようになり、ユーザのアプリケーションソフトウェアは大規模化、複雑化する一方です。SWの効率的な開発手法は、高度な車両開発にとって、欠かせない要件となりました。
E/Eアーキテクチャの進化に伴い、多くのデバイスが搭載される傾向にあり、これらデバイスに搭載されるSW同士が相互に接続された状態でのSW検証が必須です。
各実デバイスが揃い、相互接続できれば、相互接続したSW検証が行えますが、開発終盤まで課題検出が出来ず、大きな手戻りが発生します。
また、シミュレーション環境を利用すれば早期SW開発に着手できます。しかし、デバイス単体のシミュレーション環境では相互接続できず、複数のデバイスが連携したシステムレベルの検証が出来ません。このため、想定した複雑なシナリオに基づいた検証となり、品質の確保が難しくなってしまいます。
マルチデバイス用協調シミュレーション環境の概要
マルチデバイス用協調シミュレーション環境の概要
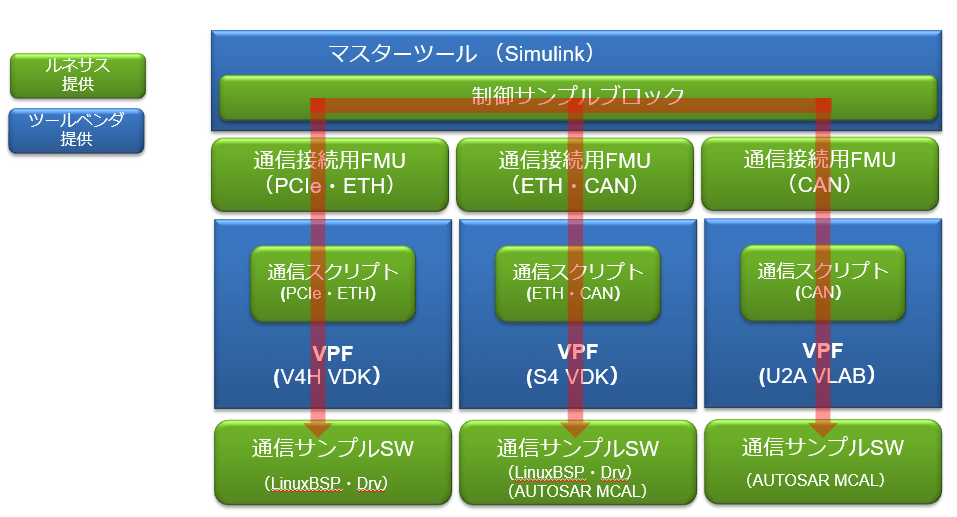
[マルチデバイス用協調シミュレーション環境の構成] を図1に示します。
ルネサスは、実機無しでデバイス間を相互接続しソフトウェア開発を開始可能とするマルチデバイス用協調シミュレーション環境を提案します。
- マスターツール(*1)経由で各VPFを容易に接続するためのFMU(*2)及び制御サンプルブロック
- FMUとVPFを接続するための通信スクリプト
- 各実機の動作を模擬するVPF(*3),
- 相互接続するVPF上で動作する通信サンプルSW
を利用する事で、実機の入手前に相互接続したソフトウェア開発を開始出来ます。
VPF上で開発したソフトウェアは実機でも動作するため、実機入手後に遅延なく、実機上でのソフトウェア開発・検証を実施出来ます。これにより、早期に相互接続されたSWの開発が開始出来、早い段階での問題検出が可能となります。(マスターツール及びVPFは、御利用される方により入手が必要)
(*1) マスターツール:各VPFの動作を調整し同期動作させるためのツール
(*2) Function Mockup Unit(FMU):異なるツール間を接続するためのモデルIFであるFunction Mockup Interface(FMI)に従い、ツール間を接続するためのライブラリ。マスターツールからインポートする事で、マスターツール内で相互接続可能になる。
(*3) Virtual Platform(VPF): 実機同様のSWが実行可能な、SOCやMCUのシミュレータ。
CANモデル同士の接続のための施策
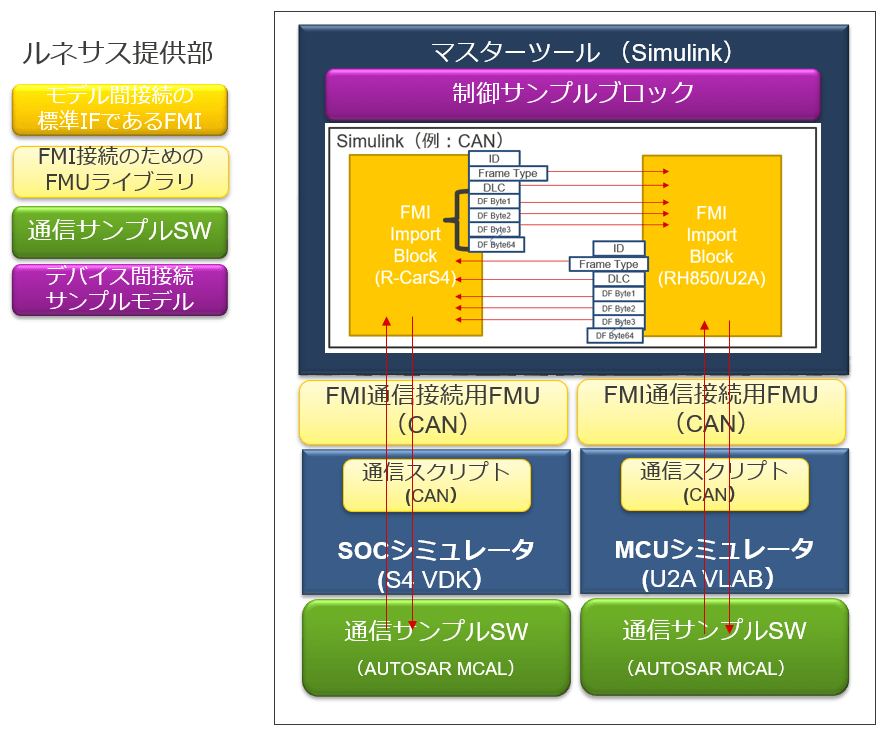
[FMIで接続されたモデル間におけるCAN通信の実現方法]を図2に示します。FMIでは、どのような型やタイミングでデータ送受信が行えるかについて定義していますが、具体的な接続仕様については定義がありません。どのパラメータをどのように接続するかは、利用者任せになっており、FMIでの接続仕様を定める必要があります。
このため、マルチデバイス用協調シミュレーション環境では、図2のFMI import Block同士が接続するためのCANの接続仕様を策定しました。この仕様に準じたFMIを持ったモデル同士であれば、接続可能になります。
マルチデバイス用協調シミュレーション環境の開発状況
今回、R-Car S4及びRH850/U2AをCAN接続したマルチデバイス用協調シミュレーション環境を、御紹介しました。
(Introduction of Virtual Platform Co-simulation)に実際の動作を録画したデモビデオを容易しているので、ご参照下さい。
このソリューション提案により、実機が無くとも相互接続したSW開発が可能な環境を利用できるようになり、車両SW開発のシフトレフトが可能となります。マルチデバイス用協調シミュレーション環境を利用する事で、未然のバグを防ぎ、全体のテスト時間を短縮し、ソフトウェアの品質向上につながります。
今後は、R-Car V4Hやモータ等のプラントモデルを接続し、より広範囲なデバイスを相互接続したソフトウェア開発・システム検討に利用できるように準備を進めてまいります。