

RH850モデルベース開発環境 Embedded Target for RH850 Virtual Platformとその機能を紹介します。製品ページ(RH850 モデルベース開発環境 [Embedded Target for RH850 Virtual Platform])にデモビデオを掲載しておりますので、そちらも併せてご覧ください。
Embedded Target について
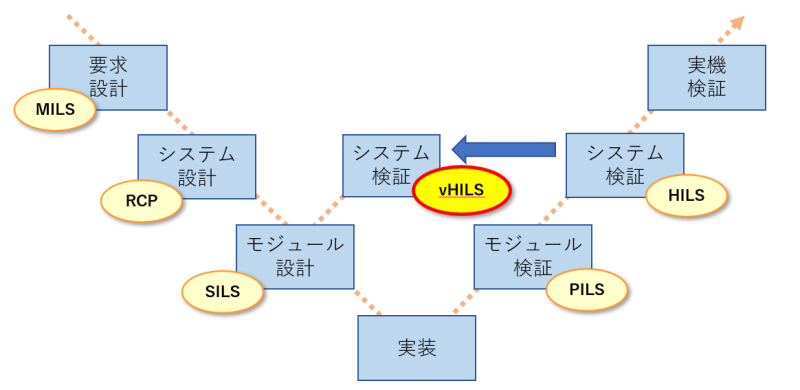
ルネサスでは、次世代自動車の開発環境としてUnified Development Environment(Corporate strategy Page.17参照)の構想を進めており、その一環として、様々な抽象度での設計に対応すべくEmbedded Targetを用意しています。Embedded Targetは様々な抽象度のモデルを変換するツールです。Embedded Target for RH850はMILSからPILSへの抽象度変換、Embedded Target for RH850 Virtual PlatformはMILSからvHILS(後述)への抽象度変換を行います。このブログではEmbedded Target for RH850 Virtual Platformについてご紹介します。
MILS: Model In the Loop Simulation. モデルベース開発で、モデルを用いて行われる検証。
PILS: Processer In the Loop Simulation. モデルベース開発で、モデルとプロセッサを連携して行う検証
Embedded Target for RH850 Virtual Platformについて
Embedded Target for RH850 Virtual Platform(以降ET-VPF)は、ルネサスが提供するモデルベース開発ツールです。従来、システム全体を検証するHILSは開発の終盤で行われてきましたが、ET-VPFでは仮想環境(Virtual Platform、以降VPF)を使用することで、HILS相当の検証を早期に行うことが可能です。ルネサスではVPFを使用したHILSをvHILSと呼んでいます。
HILS: Hardware In the Loop Simulation. モデルベース開発で、実デバイスを用いて行われる検証。
vHILS: virtual Hardware In the Loop Simulation. 実デバイスを用いて行う通常のHILSに対し、実デバイスの代わりにVPFを使用するHILSを指す。
VPFを使用したvHILS
ET-VPFでは、RH850のVPF(車載ソフトウェアの品質向上を実現するRH850 VPFの紹介)を使用してシミュレーションを行います。VPFは、Port、ADCなどの周辺IPを含めたRH850デバイスをシミュレーションすることが可能なプラットフォームです。
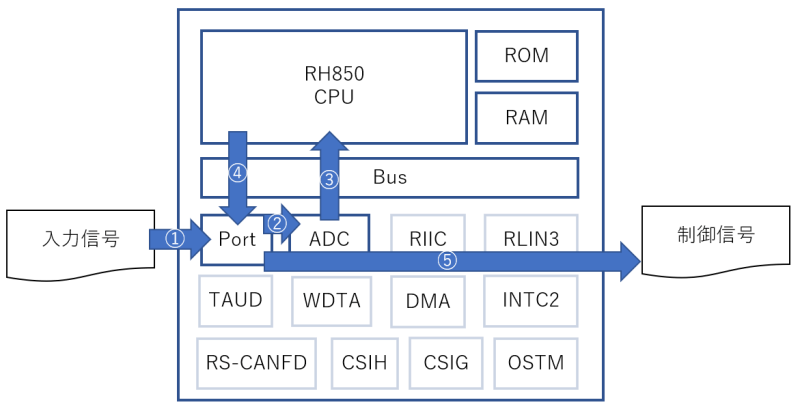
例えば、制御対象から入力Portを介して外部信号を取得し①、ADCを使用してアナログデータをデジタルデータに変換し②、CPUがADCの結果を参照してCPUでアプリケーションコードを実行してデータ処理を行った後③、処理結果④を制御信号として出力Portから出力し、制御対象を制御する⑤、というように、実デバイスを使用したHILSと同等のvHILSを行うことができます。
ET-VPFによるvHILSの実行フロー
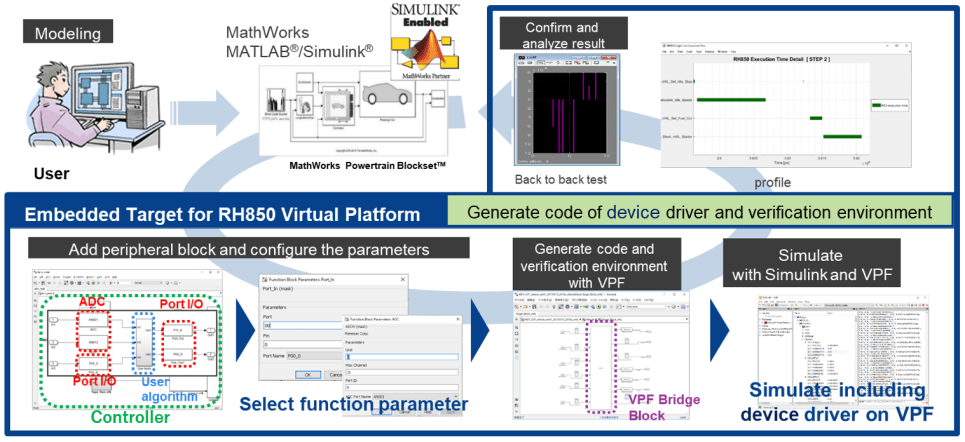
まず、ユーザが、システム全体をモデリングしたMILSモデルを作成(図3. Overview 左上)し、Controllerブロックにデバイスで制御対象を制御するための周辺IPブロックを追加します。
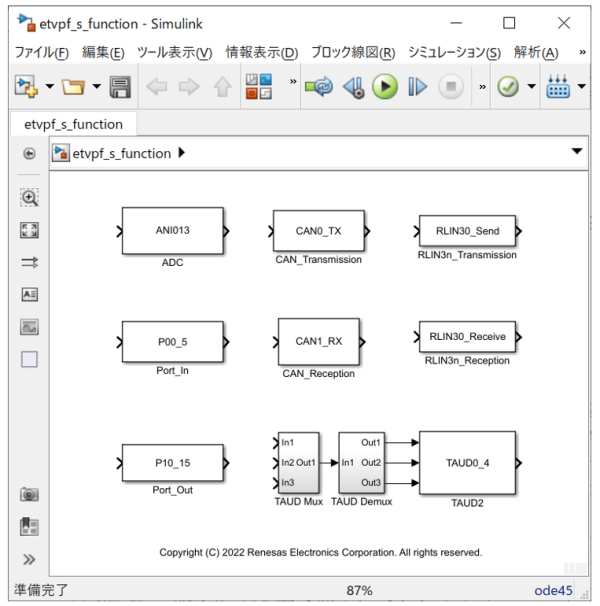
ET-VPFでは、Port, ADCなどの周辺IPをSimulink®のブロックとして提供します。
追加した周辺IPブロックについて、GUI上で主要な設定を行うことが可能です(図3. Overview 左下)。また、ET-VPFと連携するSmart Configurator上で詳細な設定を行うことができます。
以上の設定完了後、ET-VPFによりvHILS実行までの処理が自動的に行われます。
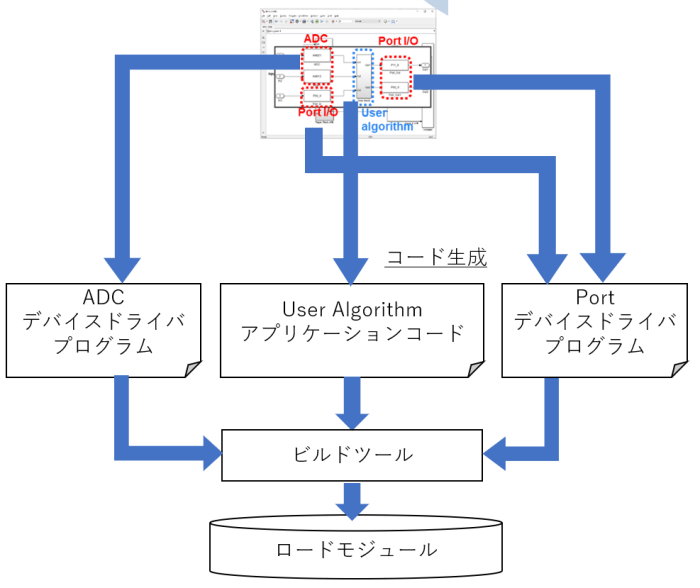
周辺IPを制御するデバイスドライバプログラムが生成されます。生成したデバイスドライバプログラムは、Controllerブロック内のUser Algorithmブロックから生成したアプリケーションコードと共にビルド環境に組み込まれ、ビルドによりロードモジュールが自動生成されます。
生成されたロードモジュールはVPFにダウンロードされます。また、ControllerブロックはSimulinkとVPFを接続するBridgeブロックに置き換えられ、SimulinkとVPFを使用したvHILSによるシミュレーションが実行されます(図3. Overview 右下)。このvHILSにより、開発早期においてシステム全体の検証が可能となります。
また、ET-VPFは、VPFの実行時間計測機能を使用して、シミュレーション実行後に1周期(制御周期)ごとの実行時間をグラフ表示することが可能です(図3. Overview 右上)。ユーザは、このグラフを参照することにより、システム全体の性能検証を容易に実行できます。
今後の展開
このように、ET-VPFを用いることで、MILSにて設計したシステム全体の検証をvHILSで簡単に実現することができます。2022年11月現在、ET-VPFはRH850/F1KM-S1,S4をサポートしています。
今後は対応するデバイスの拡充を図るとともに、様々な抽象度をサポートするUnified Development Environmentの開発を推進していきます。