
ユニバーサルモータ制御アルゴリズム
ユニバーサルモータの速度制御は一般的に2つの方法があります。
- 位相角制御
- PWMチョッピング制御
位相角制御
ユニバーサルモータにおいて最もシンプルな速度制御方法です。トライアックの点弧角を調整することで速度を制御します。位相角制御は非常にコスト効率の良いソリューションですが、あまり効率的でないことと、EMIに影響されやすいことが短所です。
画像
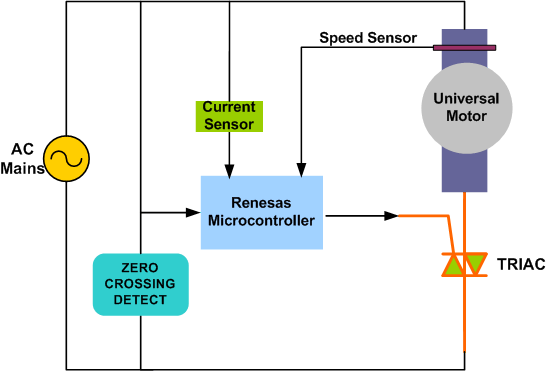
ユニバーサルモータの位相角制御
上図はトライアックの速度制御に採用する位相角制御メカニズムの例を示します。トライアックゲートパルスの位相シフトでモータの実効電圧を調整しモータの速度を制御します。ゲートパルスの点弧遅延タイミングはゼロクロス検出回路を基準に図ります。
PWMチョッピング制御
PWM制御は、ユニバーサルモータの速度を制御するためのより先進的なソリューションです。この方法ではパワーMOSFET又はIGBTデバイスで整流AC線間電圧を高周波数で切り替え、時間の関数である電圧を生成します。
画像

ユニバーサルモータのPWMチョッピング制御
雑音除去対策として、スイッチング周波数を通常に10~20KHzに設定します。このユニバーサルモータ向け制御方法は電流制御およびEMI特性が向上し効率向上が実現できます。
| 制御方法 | マイコン条件 | 推奨マイコン | ||||
| DCユニバーサル モータ制御 | トライアック | GPIO、タイマ、割り込み、A/Dチャネル | lens | |||
| PWMチョッピング | PWMチャネル 、タイマ、A/Dチャネル | lens | ||||