
Stepper Motor Control
Stepper motor control typically employs bidirectional drive current and the motor is stepped by switching the windings in sequence. For a motor of this type there are three possible drive sequences.
Image
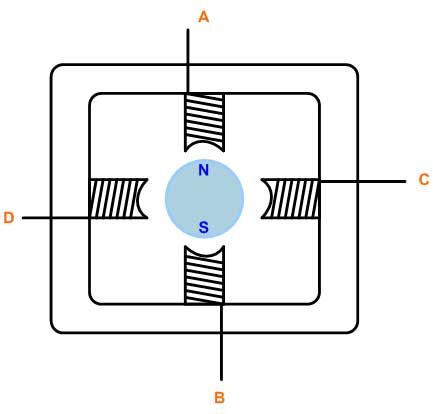
- One Phase On-Full Step Drive: In this mode of control the windings are energized in the following sequence AB/CD/BA/DC (BA means that the winding AB is energized but in the opposite sense). This sequence is known as "one phase on" full step or wave drive mode. Only one phase is energized at any given moment.
- Two Phase On-Full Step Drive: In this mode two phases are energized together so that the rotor always aligns itself between two pole positions. Called "two-phase-on" full step, this mode is the normal drive sequence for a bipolar motor and yields the highest torque.
- Half Step Mode: This method combines One Phase On and Two Phase On modes to energize one phase, then two, then one, etc., so that the motor moves in half step increments. This sequence, known as half step mode, halves the effective step angle by which the motor moves for each excitation but yields a lower torque.
For rotation in the opposite direction (counter-clockwise) any of the above three modes can be used, except of course that the order is reserved.
Stepper motors usually have multiple poles to reduce the step angle to a few degrees but the number of windings and the drive sequences are unchanged.