
ブラシレスモータは自己整流型ではないため、制御がより複雑です。
BLDCモータを制御するには、ロータ位置検出とモータを整流するメカニズムが必要となります。閉ループ速度制御の場合は、モータ速度あるいは電流の測定と、モータ速度や力を制御するPWM信号も必要となります。
BLDCモータは応用要求によってエッジアライン(エッジ整列)又はセンターアライン(中央整列)PWM信号を利用します。多くの応用は可変速度動作のみが要求となり、6つの独立エッジアラインPWM信号を利用します。この方法は最も高い分解能を与えます。サーボの位置決め、発電ブレーキ又は動的逆転(dynamic reversal)を必要とする応用の場合は、補助センターアラインPWM信号をお薦めします。
BLDCモータはホールセンサでロータの絶対位置を検出するので、より多くの巻線を必要としコストが高くなります。センサレスBLDC制御ではモータのback-EMF(逆起電力)でロータ位置を推定するのでホールセンサは要りません。低コストを求めるファン、ポンプ等の可変速度応用にはセンサレス制御が不可欠です。冷蔵庫やエアコンのコンプレッサにBLDCモータを採用する場合もセンサレス制御が必要となります。
デッドタイム挿入と補償
様々な制御アルゴリズムはBLDCモータ制御に使用されています。一般的に、リニア電圧調整器として動作するパワートランジスタを使ってモータ電圧を制御します。但し、この方法は高出力モータの駆動に実用的でないため、高出力モータの場合はPWM制御かつ起動・制御機能が提供できるマイコンが必要です。
使用する制御アルゴリズムには以下3つの必要条件があります。
- モータ速度を制御するためのPWM電圧
- モータを整流するメカニズム
- Back-EMF又はホールセンサでロータ位置を推定する方法
PWM方式で可変電圧をモータ巻線に印加します。実行電圧はPWMのデューティ比に比例します。正しく整流すればBLDCモータのトルク・速度特性がDCモータと一致します。可変電圧はモータ速度や有効トルクの制御に使用できます。
パワートランジスタの整流によって適切な固定子巻線に電圧を加え、ロータ位置に応じて最適なトルクを生成します。BLDCモータでは、マイコンでロータの位置を検出し適切なタイミングで整流する必要があります。
BLDCモータの矩形波整流
ブラシレスDCモータで一番シンプルな制御方法の一つは矩形波整流と呼ばれる方法です。
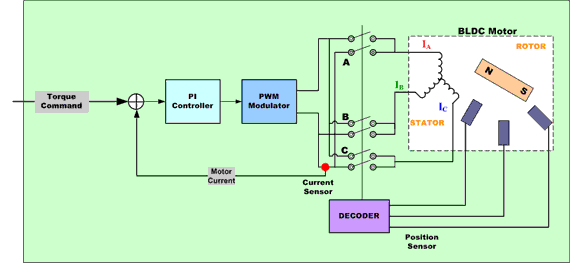
図1:BLDCモータ用矩形波コントローラを簡略化したブロック図
上記の図では、電流は一組ずつモータ端子に流れるようにします。3つ目の端子は常に電源から切断します。
通常はモータに組み込んだ3つのホール素子がデジタル出力で60°以内で測定し、ロータ位置情報をモータコントローラに転送します。どの時点においても2つの巻線に量の等しい電流が流れ3つ目が電流ゼロのため、この方法では6つの方向の中から1つの方向の電流の空間ベクトルしか提供できません。モータ回転時、電流の空間ベクトルが常に直交方向の30°以内になるように、モータ端子へ流す電流は回転度60°ごとに電気的に切り替えて整流しています。
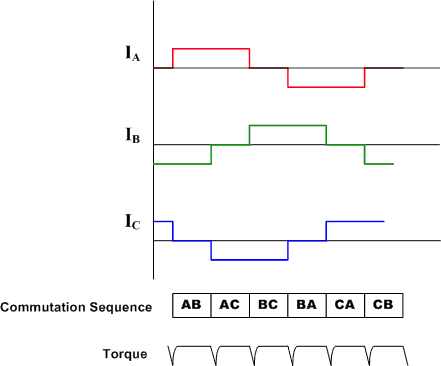
図2:矩形波駆動制御:整流時の駆動波形とトルク
各巻線の電流波形はゼロ→正電流→ゼロ→負電流の階段形になっています。
モータの回転につれて電流の空間ベクトルが6つのはっきりとした方向を通るので、スムーズな回転に近づきます。
エアコン、冷蔵庫等のモータアプリケーションではホールセンサの使用が実用的ではありませんが、接続されていない巻線の逆起電力が検出できるback-EMFセンサを使用すれば同様な結果を実現できます。
制御回路が簡易なため矩形波‐電流駆動システムはポピュラーですが、整流時のトルクリップルの欠点があります。
矩形波駆動(120度通電制御)の解説
BLDCモータの正弦波整流
矩形波整流方法はスムーズで精密なBLDCモータ制御に不十分です(特に低速動作では)。正弦波整流はこの問題を解決します。正弦波back-EMF三相ブラシレスモータのトルクは以下の方程式によって定義されています。
軸トルク = Kt [IRSin(φ) + ISSin(φ+120) + ITSin(φ+240)]
φは軸の電気角
Ktはモータのトルク係数
IR, IS and IT は相電流
相電流は正弦波の場合、IR = I0Sinφ; IS = I0Sin (+120φ); IT =I0Sin (+240φ)
なので、
軸トルク = 1.5I0*Kt (軸角に依存しない定数)
になります。
正弦波整流BLDCモータコントローラはモータ回転時、なるべく3つのモータ巻線を3つのスムーズで正弦波的に変動する電流で駆動します。この3つの電流の相対位相は、常にロータに対して直交方向にあり、定電流量のスムーズに回転する電流の空間ベクトルを得るために適切に選ばれます。これによって矩形整流方法で問題となったトルクリップルや整流スパイクが解消されます。
モータ回転時にモータ電流をスムーズに正弦波変調するにはロータの位置を正確に測定する必要があります。ホール素子でのロータ位置測定が粗いのでこの場合には不十分です。このため、エンコーダあるいは類似なものによる角度のフィードバックが必要となります。
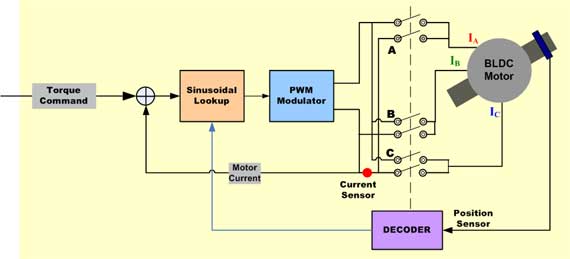
図3:BLDCモータ用正弦波コントローラの簡略化したブロック図
巻線の電流の組み合わせで定電流量のスムーズに回転する電流の空間ベクトルを生成すること、そして固定子巻線が120°ごとに配向されていることの2つの条件から、各巻線の電流は位相シフト120°の正弦波に決めます。エンコーダからの位置情報を使用して2つの正弦波を合成します。片方の正弦波は位相シフト120°になります。続いてこの2つの信号は、正弦波の振幅が目標トルクに比例させるためにトルク命令に乗算されます。2つの正弦波電流命令信号の適切な位相シフトの結果として、直交方向で回転する固定子電流の空間ベクトルが生成されます。
正弦波電流命令信号はモータ巻線の電流を調整する2つのP-Iコントローラに入力します。3つ目のモータ巻線の電流はこの2つの負の合計になるので単独で制御できません。各P-Iコントローラの出力はPWM変調器を経て出力ブリッジおよび2つのモータ端子に供給します。 3つ目のモータ端子に印加する電圧は、120°離れた3つの正弦波電圧に見合って、1、2つ目の巻線に入力された信号の負の合計によって得られます。
実出力電流波形は正確に正弦波電流命令信号が追跡できる範囲内で、結果として望んだとおりの直交方向に配向された定電流量のスムーズに回転する電流の空間ベクトルが得られます。
正弦波整流は矩形波整流で普通に実現できない程度のスムーズな制御が実現できます。但し、低速モータにおいてとても効率的であることの一方で、高速動作では効率が低下してしまいます。なぜかというと、速度が上がると電流ループコントローラは周波数の増加して行く正弦波信号を追跡しなければなりません。同時に振幅や周波数の増加して行くモータのback-EMFも乗り越えなければならないので、結果的に効率が下がります。
P-Iコントローラの利得と周波数応答に限界があるため、電流制御ループの時変摂動がモータ電流の位相のずれや利得誤差を発生します。高速であればあるほど、ずれや誤差は酷くなります。位相のずれや利得誤差は電流の空間ベクトルのロータに対しての方向をかき乱し直行方向からずらしてしまいます。
上記が起こると、一定の電流が提供できるトルクが減ってしまうので、トルクを維持するために電流を増やす必要があり、結果として効率が低下します。
速度が上がるとともに効率低下が大きくなります。やがてモータ電流の位相シフトは90°を超えトルクはゼロに落ちます。これ以上の速度は負トルクという結果となるので、正弦波整流ではモータ電流の位相シフトは90°を超える速度が実現できません。
正弦波駆動(180度通電制御)の解説
実機でも確認できます!
誰でも簡単にブラシレスDCモータの制御に取り組むことができるスタータキット
永久磁石同期モータのセンサレスベクトル制御 (アルゴリズム編) Rev.1.02 (PDF | English, 日本語)
| 制御方法 | マイコン条件 | 推奨マイコン | ||||
| RL78 ファミリ | RX ファミリ | RH850 ファミリ | RZ/T1 グループ | |||
| BLDCモータ制御 | 矩形波駆動 | インプットキャプチャ、割り込み、 三相モータ制御用PWMタイマ |
lens | |||
| 正弦波駆動 | インプットキャプチャ、割り込み、 三相モータ制御用PWMタイマ |
lens | lens | |||
| 簡易ベクトル | インプットキャプチャ、割り込み、デッドタイマ付きの三相モータ制御用PWMタイマ | lens | lens | lens | ||
| ベクトル(FOC) | 高性能マイコン+MAC、高速A/D変換器、インプットキャプチャ、割り込み、デッドタイマ付きの三相モータ制御用PWMタイマ | lens | lens | lens | ||
| センサレス矩形波駆動 | インプットキャプチャ、高速A/D変換器、割り込み、 三相モータ制御用PWMタイマ |
lens | ||||
| センサレスベクトル | 高性能マイコン+MAC、高速A/D変換器、割り込み、 デッドタイム付きの三相モータ制御用PWMタイマ |
lens | lens | lens | ||

