
概要
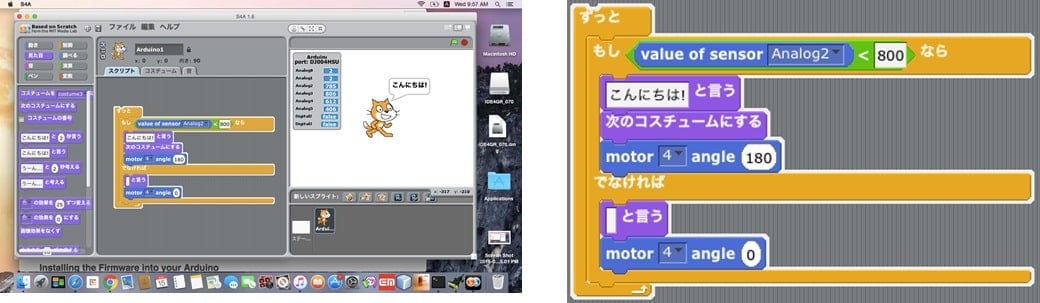
GR-ADZUKIはDCモーター、サーボ、センサー(距離、加速度、地磁気など)、電池ボックスを接続しやすくしたボードです。子供向けプログラミング言語スクラッチのArduino用派生ソフトS4Aでプログラミングが楽しめます。また、Arduino言語でのスケッチも可能です。出荷時にはS4A用のファームウェアがプリインストールされており、購入してすぐにS4Aでスクラッチでプログラミングができます。(WindowsではFTDI社のUSBドライバインストールが必要)
本ボードは、ロボット覚醒プロジェクトでの工作を効率よく進めるために企画されました。比較的激しく動くロボット工作において、ワイヤーの配線にブレッドボードを使用した場合、ワイヤーが外れて誤動作の原因になることがありました。それを解決するためにきちんとネジ止めできる端子台を搭載しています。
スクラッチでプログラミングを楽しんだ後、Arduino言語でロボット工作などチャレンジできるようにしています。
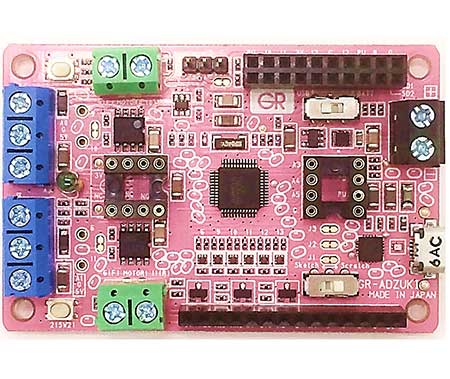
GR-ADZUKI-FULL
- ルネサス16ビットマイコンRL78/G13グループMCUを搭載
- DCモーター、距離センサー、電池ボックス用端子台を搭載。
- サーボ、加速度センサー、デジタルコンパス、マイクロSDモジュール、音声用ジャックなど搭載できるピンヘッダー、ソケットを搭載
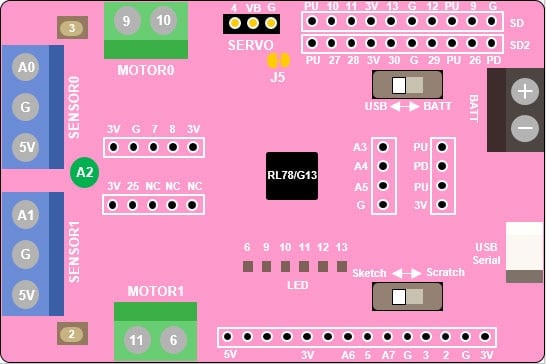
GR-ADZUKIの主な機能
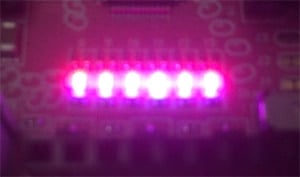
LED
6つのLEDを搭載しており、ピン6, 9, 10, 11, 12, 13に割り当てられています。色の変更もでき、赤はピン22、緑はピン23、青はピン24で制御します。例えば赤にするときはピン22をHIGHにします。黄色にするときは赤と緑を混ぜるため、ピン22とピン23をHIGHにします。ただし、色はすべてのLEDに適用されますので、LEDそれぞれを違う色にしたい場合はダイナミック点灯させる必要があります。
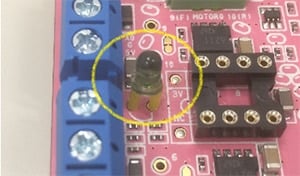
光センサー
フォトトランジスターが光センサーとして動き、明るさを測ることができます。ピンA2として割り当てられており、Arduino言語ではanalogReadで読み込むことができます。なお、読み込んだ値はLUXではありません。値の目安として明るい室内では100~200、曇りの室外で500~600、晴天では900以上となります。
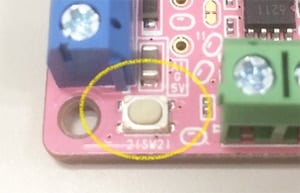
ボタンスイッチ 2個
押しボタンスイッチを2個搭載しています。それぞれピン2、ピン3として割り当てられており、Arduino言語ではdigitalReadでボタンが押されているかいないかを読み込むことができます。プルアップ抵抗はついてませんので、pinMode(pin, INPUT_PULLUP)をあらかじめ実行すると、押したときにLOW、押さないときはHIGHになります。attachiInterruptで外部割込みとしても動作させることができます。
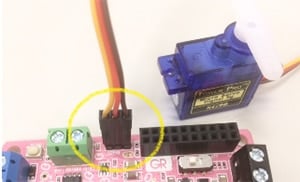
サーボモーター用ピンヘッダ
サーボモーター(秋月電子リンク)が接続できるようにピンヘッダを搭載しています。ピン4に割り当てられており、Arduino言語ではサーボライブラリで操作できます。電源ピンのVBにはDC/DCコンバーターXCL101によって生成された5Vが供給されます。供給電流は100mA程度と大きくはありませんので、小型のサーボモーターをお使いください。
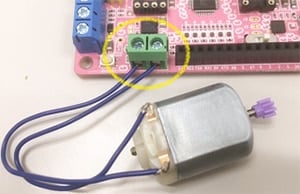
DCモーター用ターミナルブロック 2個
DCモーターが接続できるようにターミナルブロックを2個搭載しています。プラスドライバーでワイヤーを接続できます。それぞれのブロックにはピン6/ピン11、ピン9/ピン10の組み合わせで割り当てられており、Arduino言語ではanalogWriteでモーターを制御することができます。モータードライバはBD6211Fを使用しており、最大2Aまで電流を供給できますが、USB接続時はPCへの過負荷につながるため、小型なDCモーターであってもanalogWriteで設定する値は100程度としてください。モーター制御は正転逆転ができ、例えばピン6/ピン11(MOTOR1)を制御する際、ピン6をHIGH、ピン11をLOWにすると正転、ピン6をLOW、ピン11をHIGHにすると逆転します。両方ともLOWにすると停止します。
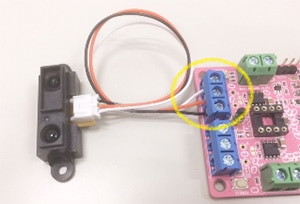
距離センサー用ターミナルブロック 2個
(圧力センサー等、抵抗が変化するセンサーにも応用可能)
距離センサーが接続できるようにターミナルブロックを2個搭載しています。プラスドライバーでワイヤーを接続できます。シャープ製距離センサーGP2Y0A21YK(秋月電子リンク)を接続することを想定していますが、5V系アナログ出力のセンサーであれば接続可能です。2個のブロックの信号入力はそれぞれピンA0, A1に割り当てられており、Arduino言語ではanalogReadで値を読み込むことができます。距離センサーを接続した際は物体が近づくほど数が大きくなり、10cm程度で300~400、20cm程度で100~200の値になります。なお、近づきすぎると赤外線の反射光があたらないため、値は逆に小さくなります。
また、入力信号にはGNDに接続された抵抗10kΩと、入力に直列に接続された抵抗10kΩの分圧が入力されるため、例えば圧力センサー(秋月電子リンク)を5VとA0に接続して使用することもできます。
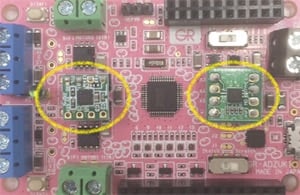
加速度センサー(アナログ出力)、デジタルコンパス(I2C通信)用DIPピンソケット
加速度センサーKXSC7-2050、デジタルコンパスHMC5883Lが接続できるようにDIPソケットを搭載しています。加速度センサーはピンA3にX軸、A4にY軸、A5にZ軸が割り当てられており、Arduino言語ではanalogReadで読み込めます。デジタルコンパスはピン7にSCL、ピン8にSDAが割り当たっており、Arduino言語ではWireライブラリで値を読むことができます。
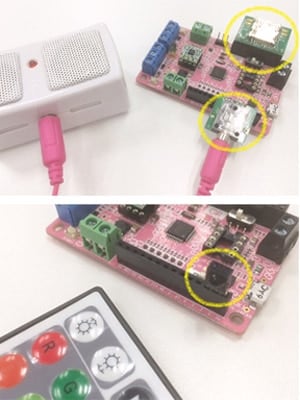
マイクロSD、オーディオジャック、赤外線リモコン用拡張ピンソケット
拡張ピンソケットには一見無秩序にピンが割り当てられているように見えますが、実際には市販の部品がそのまま接続できるように並べられています。
マイクロSD(秋月電子リンク)モジュールはArduino言語のSDライブラリによってデータロガーが簡単に作れるほか、WAVファイルプレーヤーライブラリによって音声再生も簡単にできるようになります。オーディオジャック(秋月電子リンク)を接続することで、アンプ付きのスピーカーを取り付ければ適当な音量で音声を出力できます。
赤外線リモコン受信モジュール(秋月電子リンク)を接続すれば、リモコンでGR-ADZUKIを操作できるようにもなります。例えばリモコンでサーボモーターや音声を再生するといったこともできるようになります。
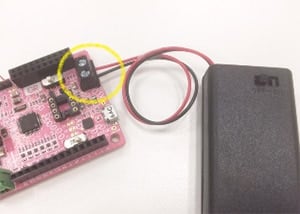
電池ボックス用ターミナルブロック
電池ボックスが接続できるようにターミナルブロックを搭載しています。プラスドライバーでワイヤーを接続できます。入力電源の電圧は0.9Vから5Vになっており、乾電池(1.5V)であれば1本~3本でGR-ADZUKIを動作することができます。この電源入力を使用するときはスイッチ設定をBATTにしてください。
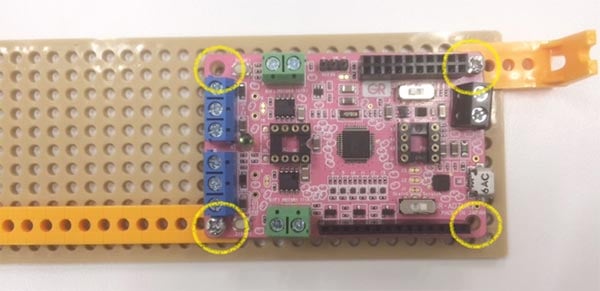
タミヤ製ユニバーサルプレート用ネジ穴
4つの角にφ3mmのネジ穴があり、これらはタミヤ製ユニバーサルプレートに取り付けられるよう5mmグリッドで配置されています。
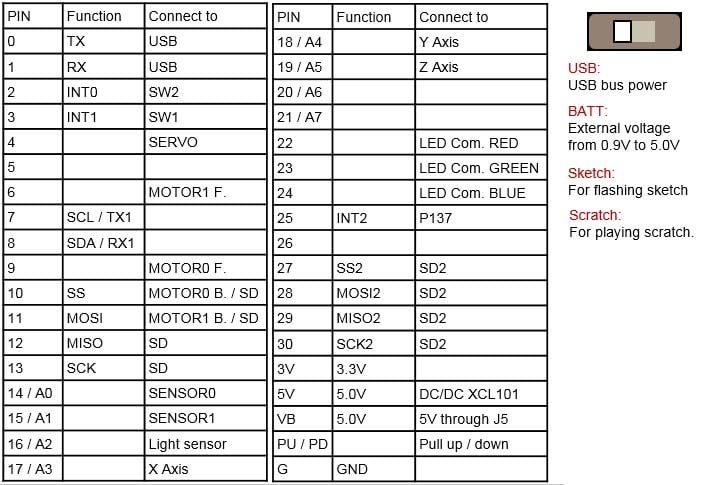
GR-ADZUKIピンマップ
訂正のお知らせ:MOTOR1のターミナルブロックについて、ボードとピンマップカード(製品添付)に誤記がありました。モーター接続の際は、配線位置にご注意ください。訂正の詳細は秋月電子様の製品サイトをご参照ください。(2017.1.30)
詳細仕様
搭載マイコン
RL78/G13 (R5F100GJAF B 48pin QFP)
ROM/RAM
256KB/20KB
Data Flash
8KB
メインクロック
32MHz (マイコンに内蔵)
サブクロック
32.768kHz
動作電圧
2.7V~5.5V※
※マイコンの下限は1.6Vですが、ライブラリ仕様上2.7Vからサポート
関連情報
プログラム作成・書き込み
- GR-ADZUKI特設サイト
初心者の方のために用意している公式サイトです。 - ユーザーコンテンツ
ユーザーが作成してくださったGR-ADZUKIの使い方です。 - ロボット覚醒プロジェクト
ロボット覚醒プロジェクトはGR-ADZUKIを生むきっかけとなったプロジェクトです。
e2 studio用プロジェクト
Eclpseをベースにした開発環境e2 studioでスケッチを行うためのプロジェクトファイルです。e2 studioのダウンロードとインストールについてはe2 studio製品ページを参照してください。
- クリックしてダウンロードしてください。e2 studioのメニュー「ファイル」→「インポート」から、既存ワークスペースとしてアーカイブファイル(zip)のままインポートできます。
ADZUKI Sketch v204 Project File (ZIP)
補足:e2 studio Version 7.2でエクスポートしたプロジェクトです。
技術サポート情報
技術情報
- がじぇっとるねさすサポートコミュニティ
様々な作品やプログラム、最新情報が満載です。こちらに作品や質問をお気軽に投稿ください。 - お問合せE-mail [email protected]
関連Webページ
がじぇるね工房 - GR-ADZUKI関連記事一覧
『がじぇるね工房』では、ルネサスからお願いした“ルネサスMVP”による作品記事を一挙公開しています。GR-ADZUKIに関連する記事を紹介します。



