图像
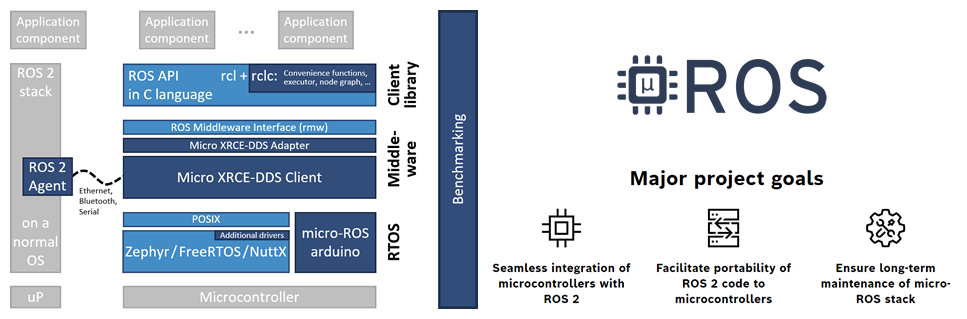

micro-ROS is an open source project to realize ROS 2, the second generation of ROS (Robot Operating System) on a microcontroller in various robot applications. By using a common framework, it enables interoperability with conventional robots, IoT sensors and devices.
Renesas is collaborating with eProsima, a leading provider of micro-ROS frameworks, to develop a ROS-based robot body controller based on RA6M5, which will simplify the design process by providing an optimal platform for micro-ROS implementation. The RA6M5/RA6T2-based micro-ROS project will also contribute to reducing the risk in the design of various applications, such as service robots for logistics and warehousing, security, agriculture, and healthcare.
For inquiries about the Renesas micro-ROS solution, please contact [email protected].
Key Features
This system enables the control of multiple servos based on the Robot Operating System (ROS). ROS is a set of software libraries and tools, maintained by many companies as open source, that help designers build robot applications.
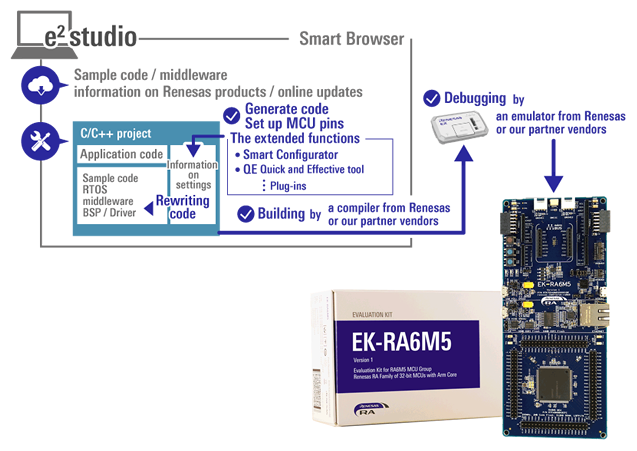
EK-RA6M5 评估套件可通过灵活配置软件包 (FSP) 和 e2 studio IDE,帮助用户对RA6M5 MCU 群组的特性进行无缝评估,并对嵌入系统应用程序进行开发。用户可利用丰富的板载功能以及自选的热门生态系统插件来将丰富创意变为现实。
MCK-RA6T2 是一款便于评估使用永磁同步电机(无刷直流电机)的电机控制的开发套件。 通过使用本产品以及可从网站下载的样例程序和QE for Motor,即刻开始使用 RA6T2 进行电机控制评估。
| Software title
|
Software type
|
公司
|
|---|---|---|
| e² studio 基于 Eclipse 的瑞萨集成开发环境 (IDE)。
[支持MCU/MPU:RA、RE、RX、RL78、RH850、Renesas Synergy、RZ]
|
IDE and Coding Tool | 瑞萨电子 |
1 item
|
||
| 博客 | 2023年3月27日 | ||
| 新闻 | 2021年9月2日 |





