次世代自動車の車両電子システムは電動化と自動運転を軸に進化が進んでいます。図は車両電子制御システムの進化について説明しています。
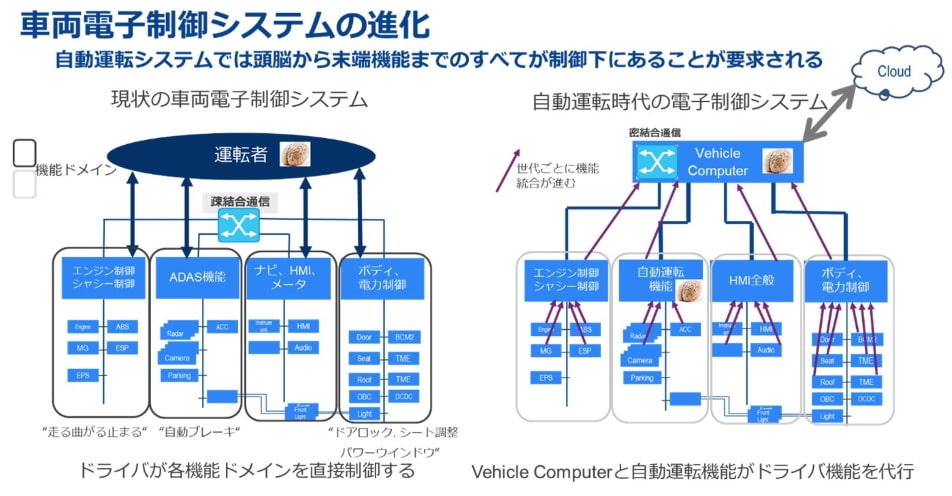
現状の車両電子制御システムはドライバが各機能ドメインを直接制御する構成のため、各ドメイン間の通信は疎結合であり、かつドメイン間は比較的独立に作られており、他ドメインの影響を受けないで動作する構成になっています。一方で、自動運転時代の電子制御システムはドライバの代わりにVehicle computerと呼ばれる中央制御システムが自動運転機能を制御するために、各ドメイン間の通信は相対的に多くなり(密結合)、ドメイン間の独立性は低くなります。また、制御プログラムの規模も指数関数的に増えていくため、安全な形でのOTA(Over the air)が必須となり、またOTAによる制御を確実にするために、OTA対象のSWは末端のHWから中央のHWへと対象HWを変えていきます。(紫の矢印)また、中央制御システムとCloud間の通信もシステムの必須条件になります。
EVの自動運転における電力影響
次にEVにおける自動運転の電力消費量についての課題を説明します。
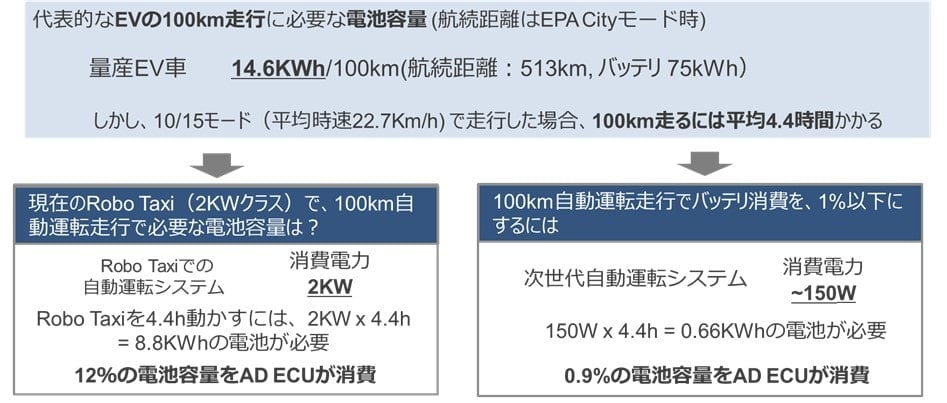
代表的なEV車の100Km走行に必要な電池容量を考えてみます。例えばEPA Cityモードで走行する場合には、100Kmで14.6KWhの電力を消費しますが、平均時速22.7Kmで市中を走ると100Km走るには4.4時間かかることになります。ここで現状のRobo taxiを考えると自動運転機能全体で2KW程度の電力消費と仮定すると4.4時間の走行では8.8KWhの電力が必要となり、このEV車の搭載バッテリを75KWhとすると、100Km自動走行する間に自動運転機能が12%の電池容量を消費していることになります。この電池容量の消費を1%以下にするためには、自動運転機能全体の消費電力を150W以下にする必要があります。自動運転においてもっともComputing powerを消費するディープラーニングの低消費電力化が如何に重要か、この数字からもお分かりいただけると思います。そしてディープラーニングの応用分野が今後も増えていくことからこの改善がSDGs, ESGの観点でも重要度が増していくことになります。
エッジデバイスにおけるヘテロジーニアスコンピューティングでの性能最適化
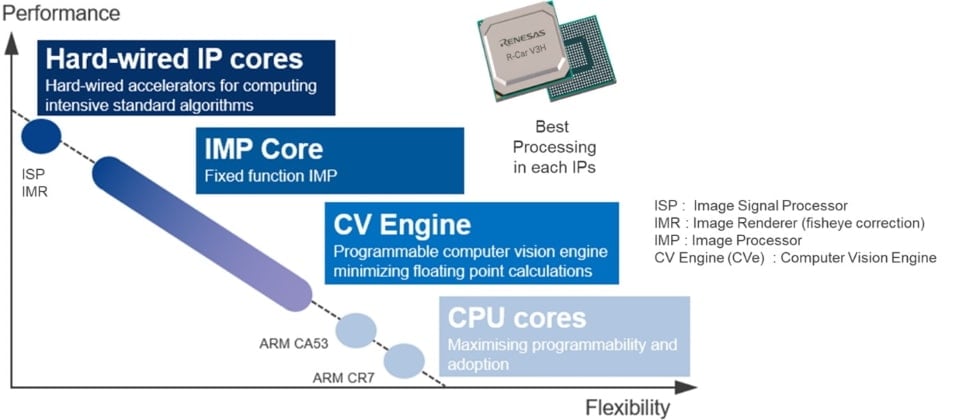
データセンターで使用されるCPUやGPUとは異なり、エッジデバイスにおいては電力およびターゲットコストに厳しい制約があります。そのため、エッジデバイスにおいてはターゲットのアプリケーションに最適な機能のHWまたは特定用途のプロセッサを組み合わせたヘテロジーニアスアーキテクチャが製品の要になります。そのため、ADAS・ADの分野ではHWのIP、プログラマブルプロセッサ、CPUを組み合わせ形のLSIをR-Car Vシリーズでは提供しています。下図はR-Car V3HのHW構成例になります。
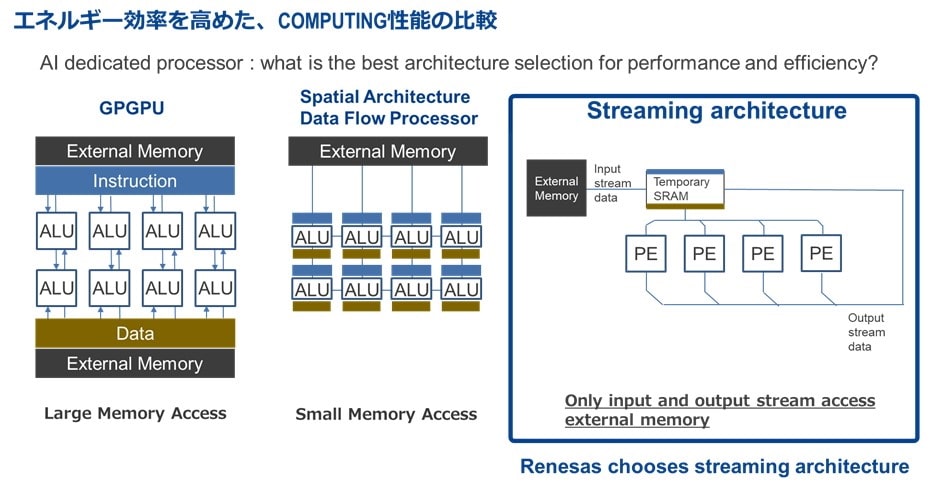
Streaming Architectureの採用
ADAS・AD分野でのディープラーニングエンジン(CNN-IP)には、高いTOPS値が必要となっており、CNN-IPの低電力化がチップ全体の電力の決める大きな要素になっています。そのためルネサスは、様々なアーキテクチャの中から、最も電力効率の高いStreaming architectureを採用しています。Streaming Architectureにおいて、CNN-IPは外部メモリへのアクセスを最小限に抑え、各PE(processor element)とSRAMの間の効率的なデータ転送を低電力で実行します。
ルネサスのADAS/ADのディープラーニング実行時のLSI電力ターゲットは前方カメラECUで5W以下、セントラルADAS ECUでは30W以下としており、システムの空冷放熱を可能にしています。これらの電力目標は量産普及車でADAS/ADシステムを実用化するための重要な指標になっています。
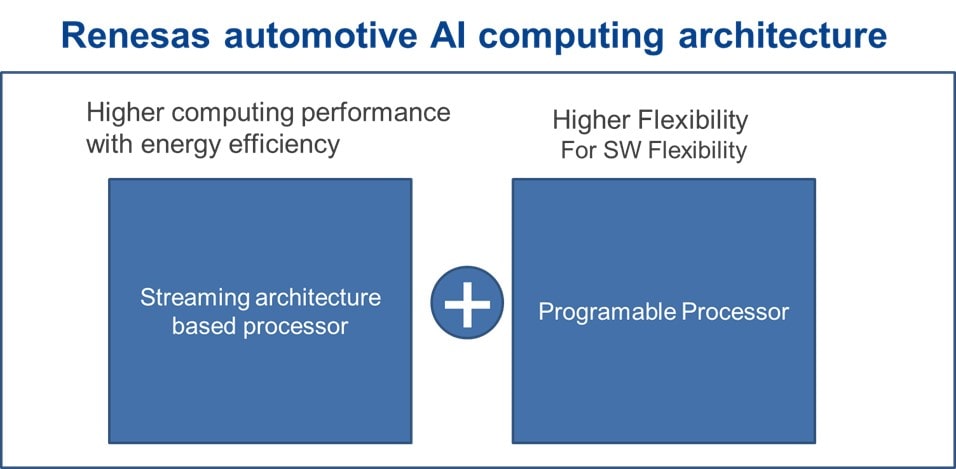
ルネサスのAIアーキテクチャ
自動運転分野において、ディープラーニングの活用は今後も進み、新しいネットワークへの対応が重要になります。そのため、ルネサスはStreaming architectureに加え、特定用途向けのprogrammable processorを加えた形を自動車向けAI computing architectureと定義して開発を続けています。現状のディープラーニングの95%以上を占める畳み込み演算、Activation、Pooling処理などはStreaming processor側で処理し、新しい関数への対応はprogrammable processor側で対処することで、電力とフレキシビリティの両立を追求しています。
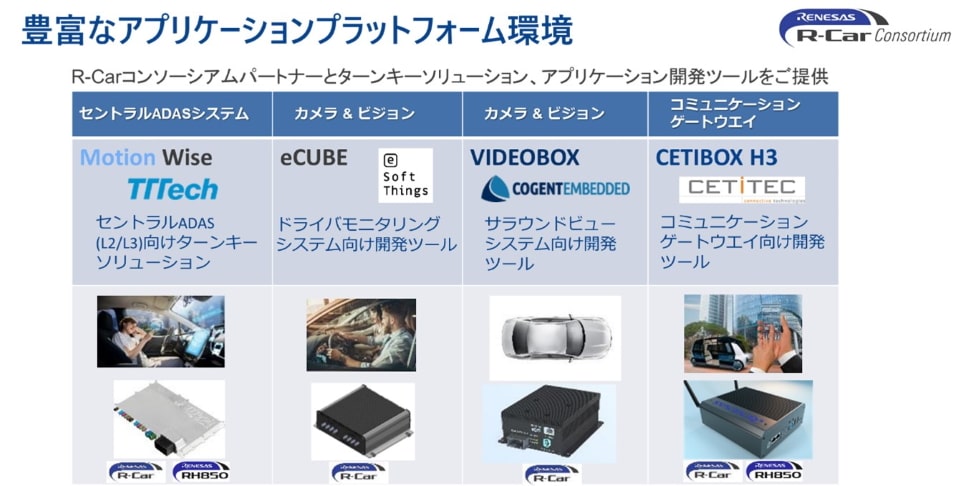
最後にルネサスの自動車向けAIソリューションのアプリケーション開発に欠かせない開発ツールについてご紹介します。自動車向けAIといっても、下図のようにカメラ、ゲートウエイ、セントラルADASなど、様々なアプリケーションにおいて、異なる開発環境が必要であり、R-Carコンソーシアムで長年協業を続けている有力パートナーとターンキーソリューション、アプリケーション開発ツールを提供しています。
詳しくは、R-Carコンソーシアムのサイトで是非ご確認ください。