图像


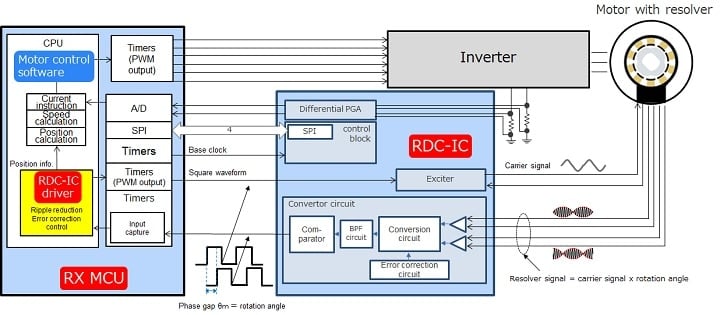
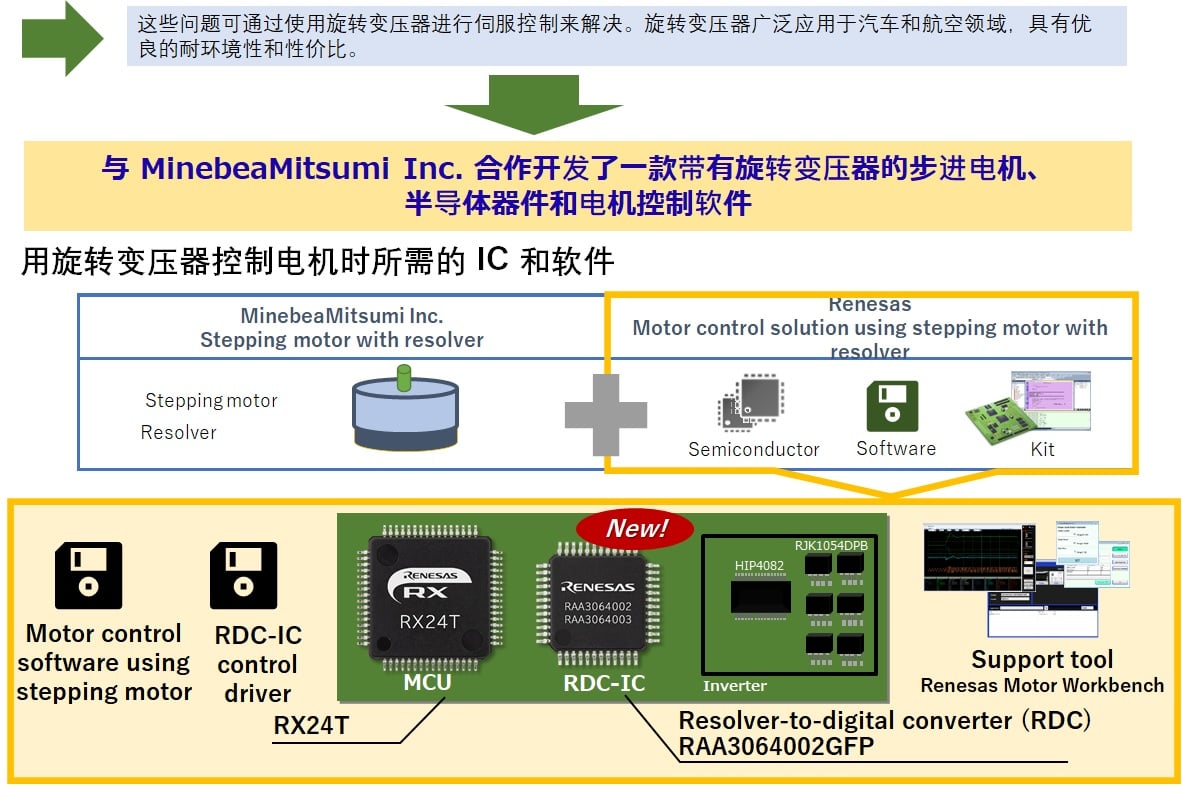
这些基于旋转变压器的电机控制解决方案,是通过将旋转变压器到数字转换器 (RDC) IC 和 RX 系列微控制器 (MCU) 相结合而实现的工业和消费应用的电机控制系统。利用微控制器的驱动程序软件,可以方便地控制基于旋转变压器的步进电机或无刷直流电机。提供了解决方案套件、示例代码、开发支持工具和带旋转变压器的电机应用笔记,使用旋转变压器的电机控制可立即启动。
在基于旋转变压器的电机控制解决方案中,RDC IC 和 RX MCU 将来自旋转变压器的信号处理为角度信息,RX MCU 则控制电机。RX MCU 上提供了 RDC IC 专用驱动程序,使用 API 可以轻松地执行旋转变压器处理。
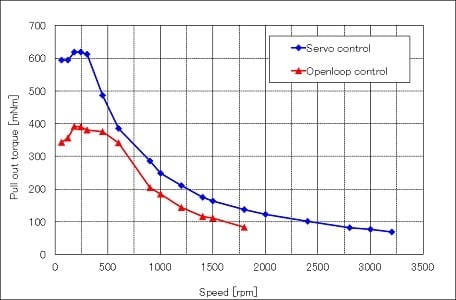
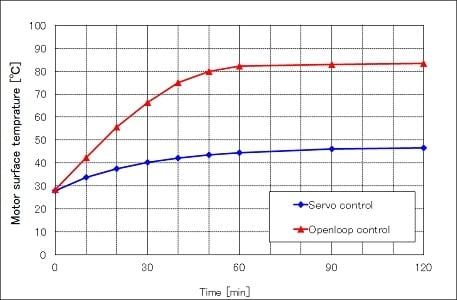
通过使用旋转变压器执行伺服控制,可以显著降低待机电流,并且只消耗负载所需的电流。此外,还可通过降低电流消耗来抑制电机的发热。
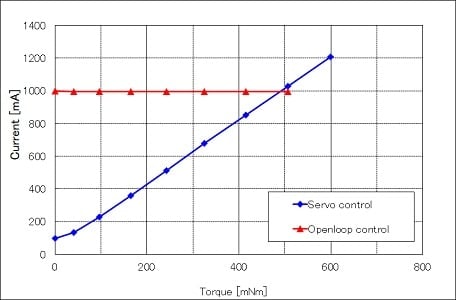
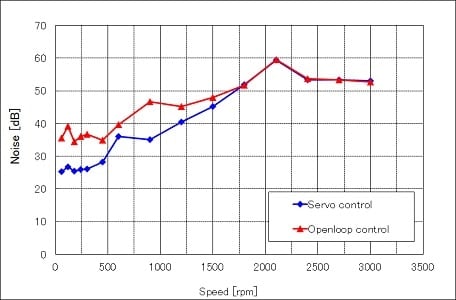
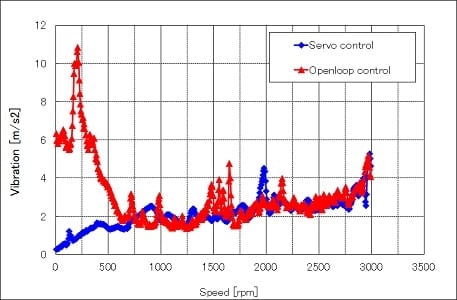
在开环控制过程中,由于电机在负载扭矩为 500mNm 或更大时失步,因此没有获得任何数据。
与开环控制相比,使用旋转变压器执行伺服控制可以抑制高达中速范围的噪声和振动。
我们基于带有旋转变压器的步进电机控制方案, 开发了适用于两轴手臂机器人的参考指南
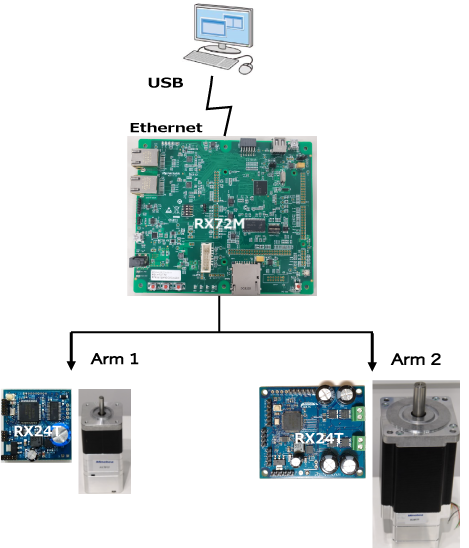
RX24T, RX72M, RAA3064002GFP/RAA3064003GFP Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev.1.00 (PDF | English, 日本語)
RX24T, RX72M, RAA3064002GFP/RAA3064003GFP Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping Motors Incorporating Resolvers Rev.1.00 - Sample Code (ZIP | English, 日本語)
正在开发中。
This solution kit allows you to easily evaluate and study the RX family and resolver to digital converter (RDC) ICs provided by Renesas. A stepping motor with resolver...
|
|
|
|
|---|---|---|
| 类型 | 文档标题 | 日期 |
| 应用文档 | PDF 3.43 MB 日文 | |
| 应用文档 | PDF 3.57 MB 日文 | |
| 应用文档 | PDF 3.07 MB 日文 | |
| Tool News - Release | PDF 170 KB 日文 | |
| 应用文档 | PDF 4.01 MB 日文 | |
| 应用文档 | PDF 495 KB 日文 | |
| 应用文档 | PDF 1.09 MB 日文 | |
7 items
|
||
